 EK
EKHere are some improvements that were made to the bot to fix the issues diagnosed previously.
Read more to see all the details
Rigid Hinges
The hinges do not need to move past 90 degrees. I decided to switch to a rigid hinge because it will provide more stability to the sides with the motors, which will be necessary for navigating its environment.
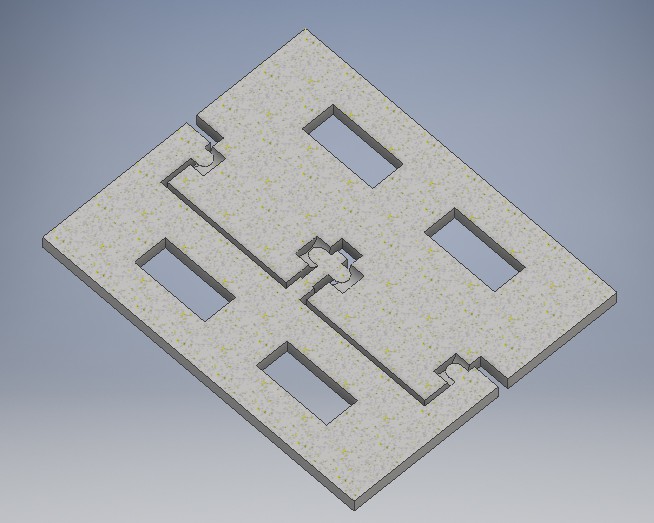
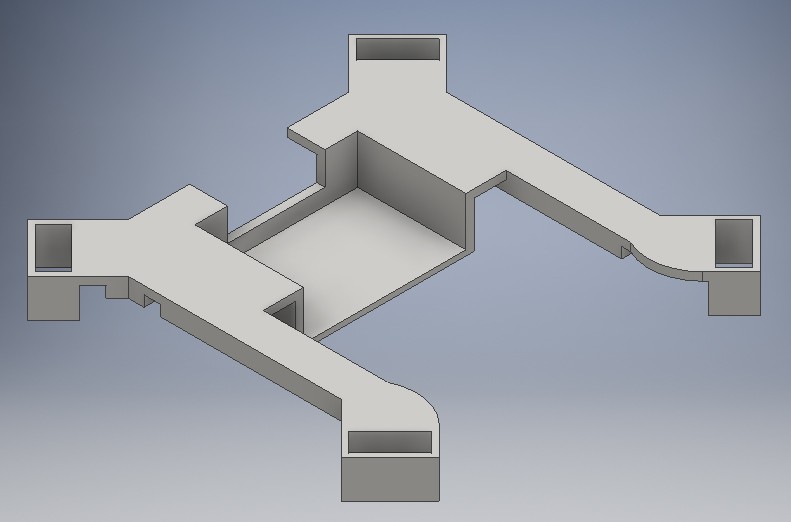
Here is the new design. It's printed in place without supports, the hinge cannot be sepparated:
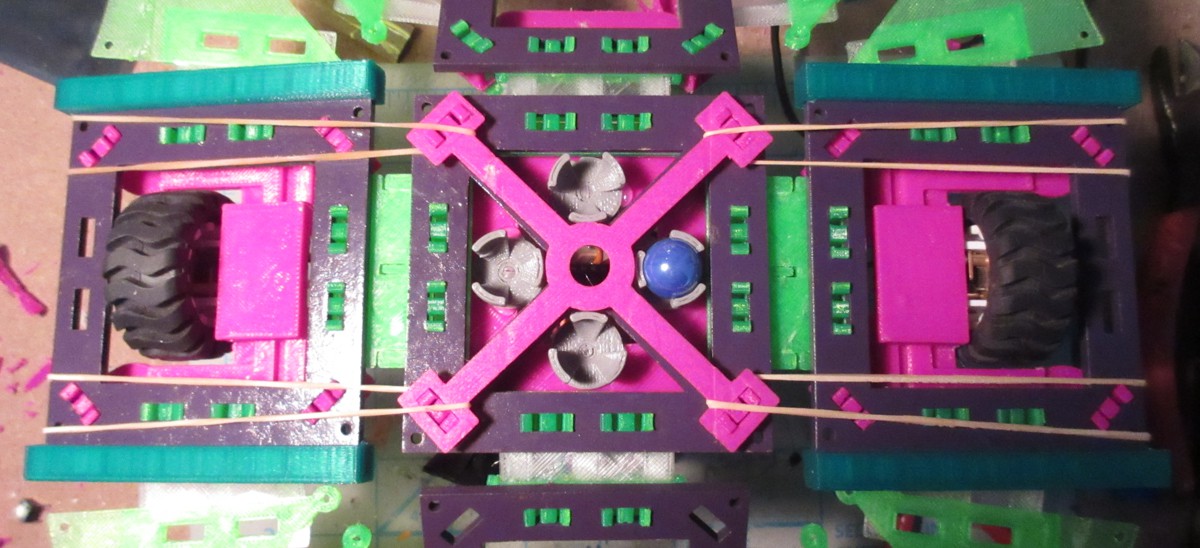
 Here is what it looks like on the bot:
Here is what it looks like on the bot: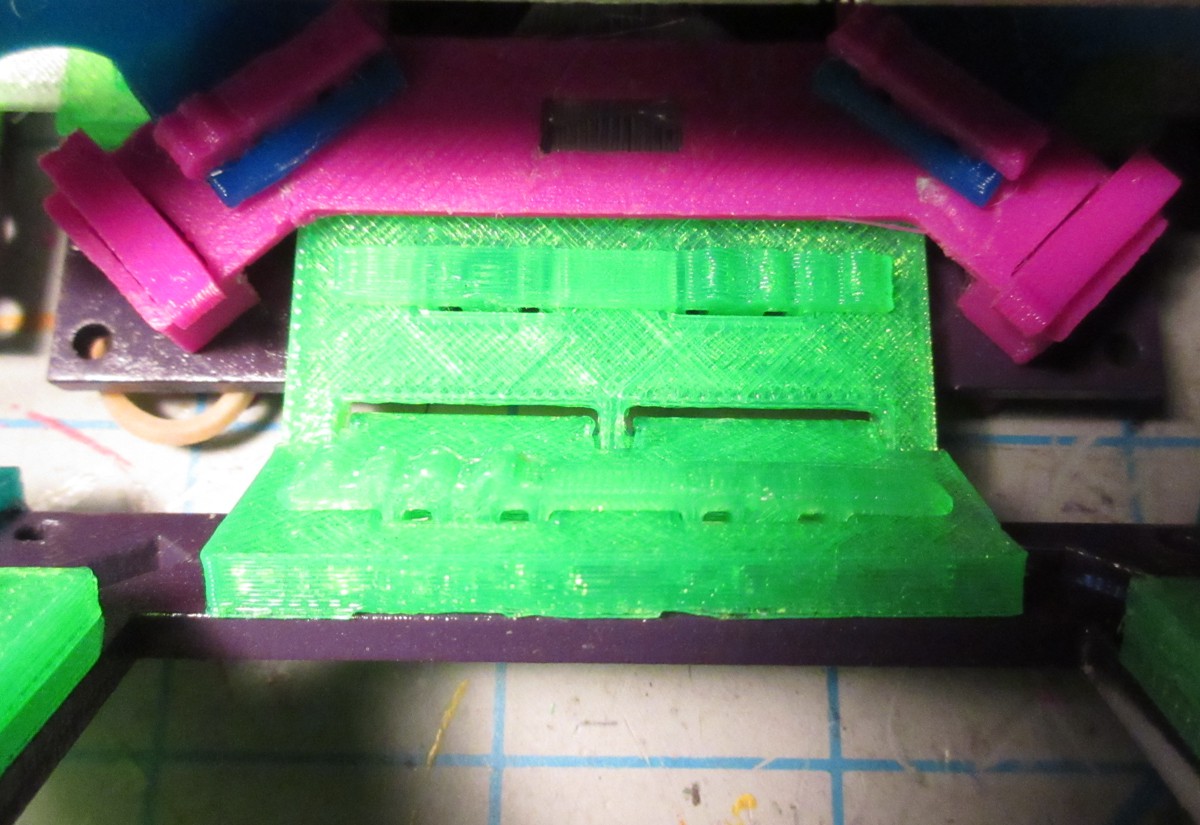
Here is an initial video of this test, RDAS working on carpet:
I made a mistake with this test. Didn't account for the 'grain' of the carpet. So the bot did not actually work in all directions on carpet. Time to fix the next thing.
Motor Mount Piece
Currently the piece that the motor is mounted on is a flat piece. It could have an indent that would drop the wheel down more. This would help with it being able to not drag the rails and sides along the ground, because the amount that the wheel is extending is raising it up.
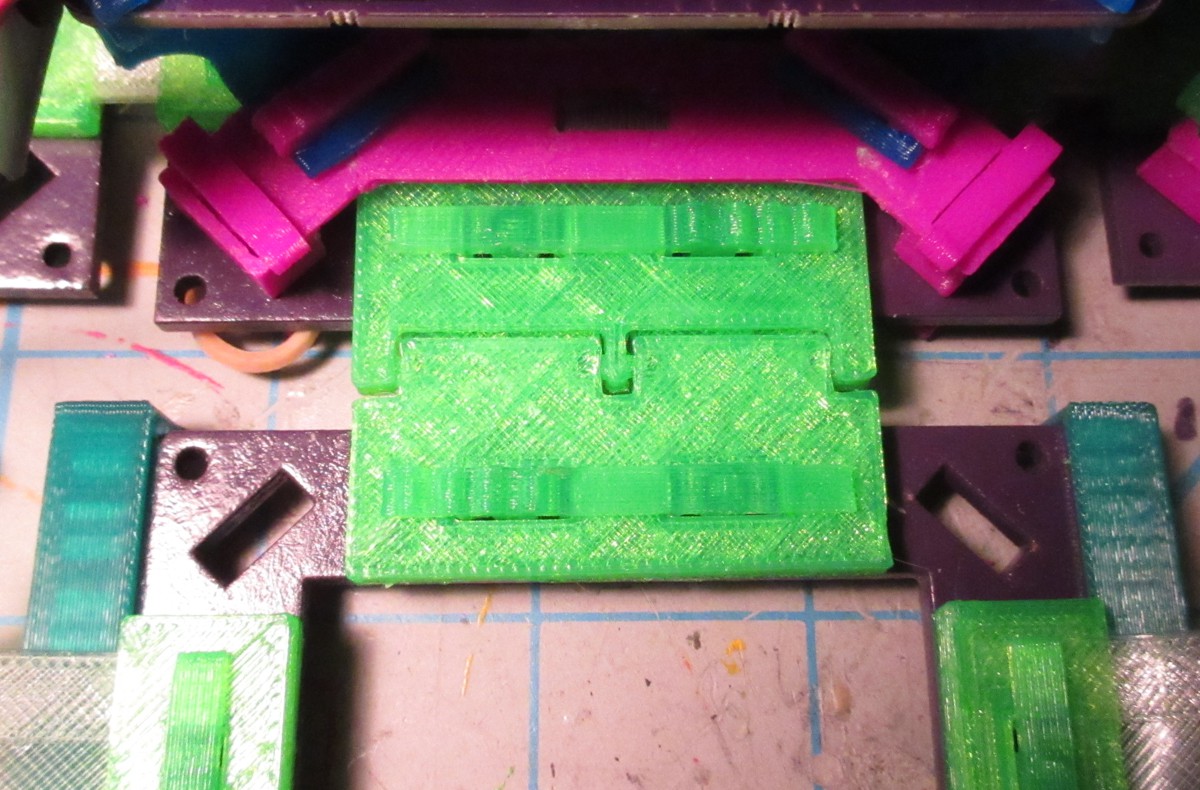
New designed piece (printing it with supports is necessary):
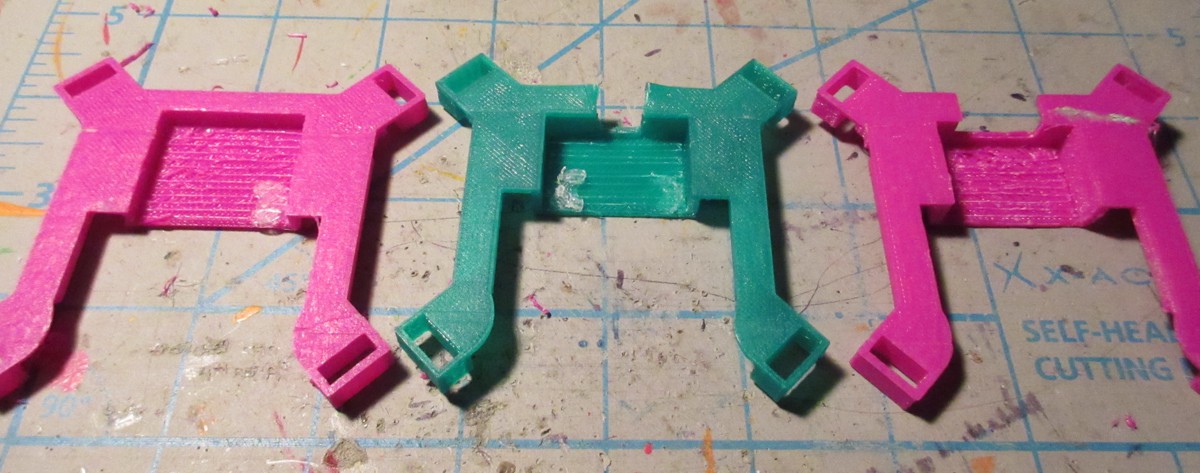

Here is how far the wheel extends now:
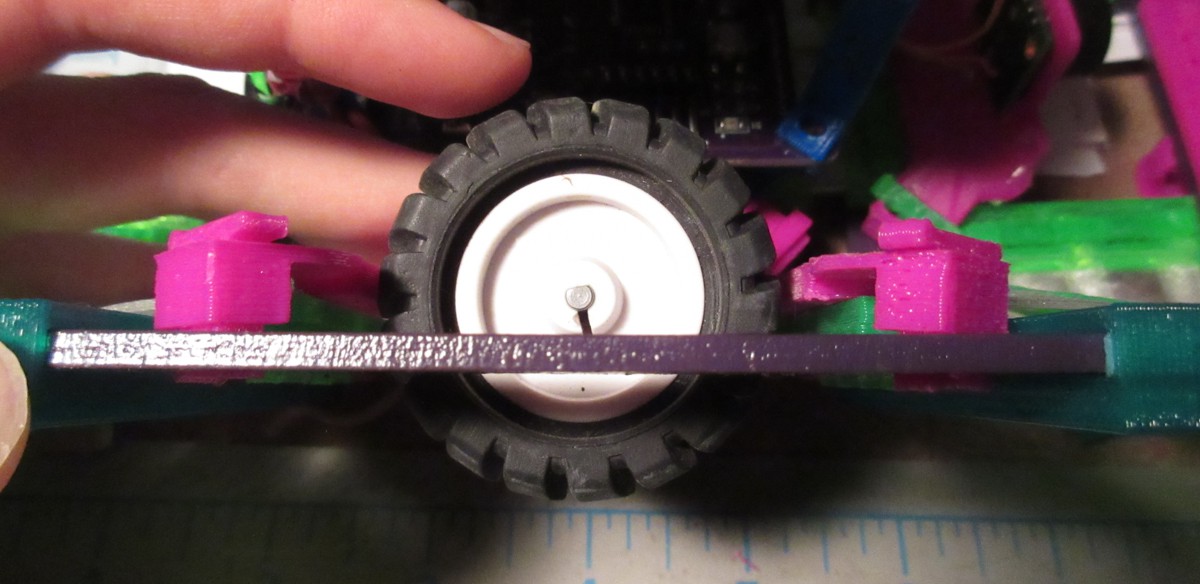
The edge of the wheel extends past the rails now, which would be a problem in an actual CubeSat deployer.
One way to fix this would be to have the motor initially compressed using springs while in the folded position. Burn wire would be holding this in place. After being deployed, the burn wire would be removed (by burning it), and the motor would snap into position from the force of the springs. It would be locked to this height, and would not be able to move back up.
For the purposes of this prototype and moving along, I'm going to focus on other aspects of the bot before fixing that.
Elastic Bands
How to make the side pieces with the motors snap down, but also be able to be folded up? I tried a few different things, like with springs, clothes peg springs, but finally settled on four elastic bands.
The bands loop around the last snap of the mount piece. They go underneath the side to loop around snaps on the base that are used for the vertical holder.
Here was the first try at this:
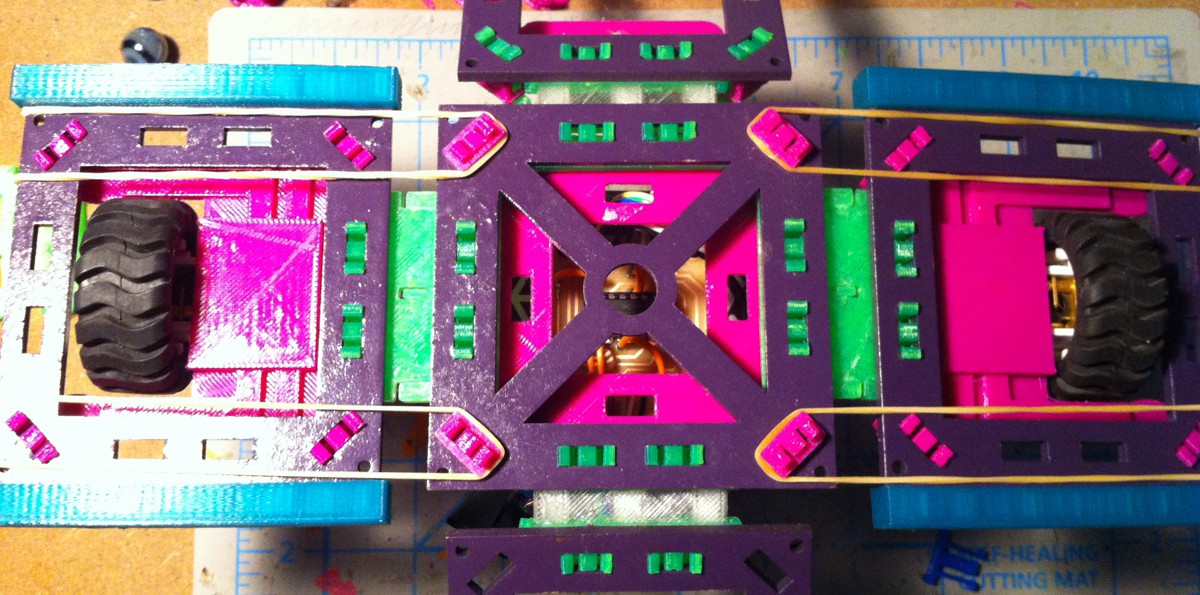
The problem with this was the bands kept flying off of the simple knobs around the snaps. Improved this by making a piece that attaches to all snaps:
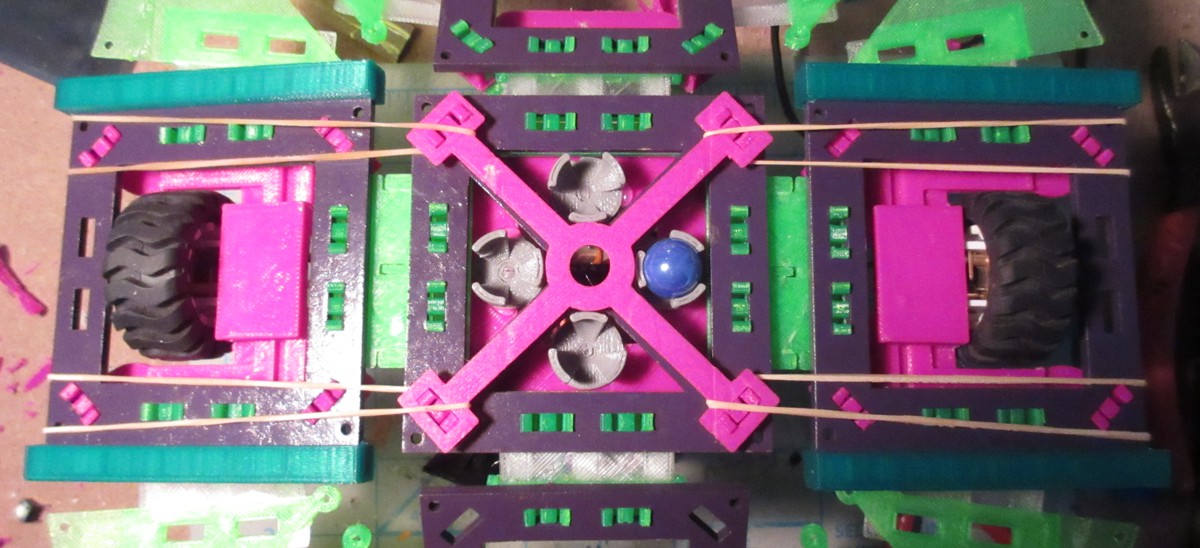
In action:
Next Steps
Now, the bot works in all directions on the carpet. Time for more difficult terrain. Going to have the first field test with the bot and evaluate what should be further improved.
One of the core tasks that I think this RDAS: Drive module would be a plow. It could push dirt / mud / gravel around, and build piles or help clear paths with it.
While doing the field tests will have this goal in mind. Preliminary check of the robot prior to the test:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.