 Astu
AstuThe control is made over UDP packets. They're not very reliable, but as we well always be in sight of it, it shouldn't be a problem. Aside from moving, it has features like the song of Cantina and of course the main theme from Star Wars. Also a fully functional radio. A servo controls its head and it features an amazing totally normal blue LED. No holo projector, sorry. ;( Had to keep it in budget.
0%
0%
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 lion mclionhead
lion mclionhead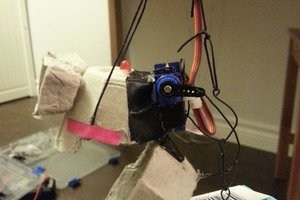
 BrendanMatkin
BrendanMatkin
 fbrktr
fbrktr