 williamg42
williamg42Sorry for the delay in updating this project, but it's the final stretch in the semester so I have not had a lot of free time. However I have had time to finalize several electrical and mechanical improvements, order parts, and render some new models to show the changes!
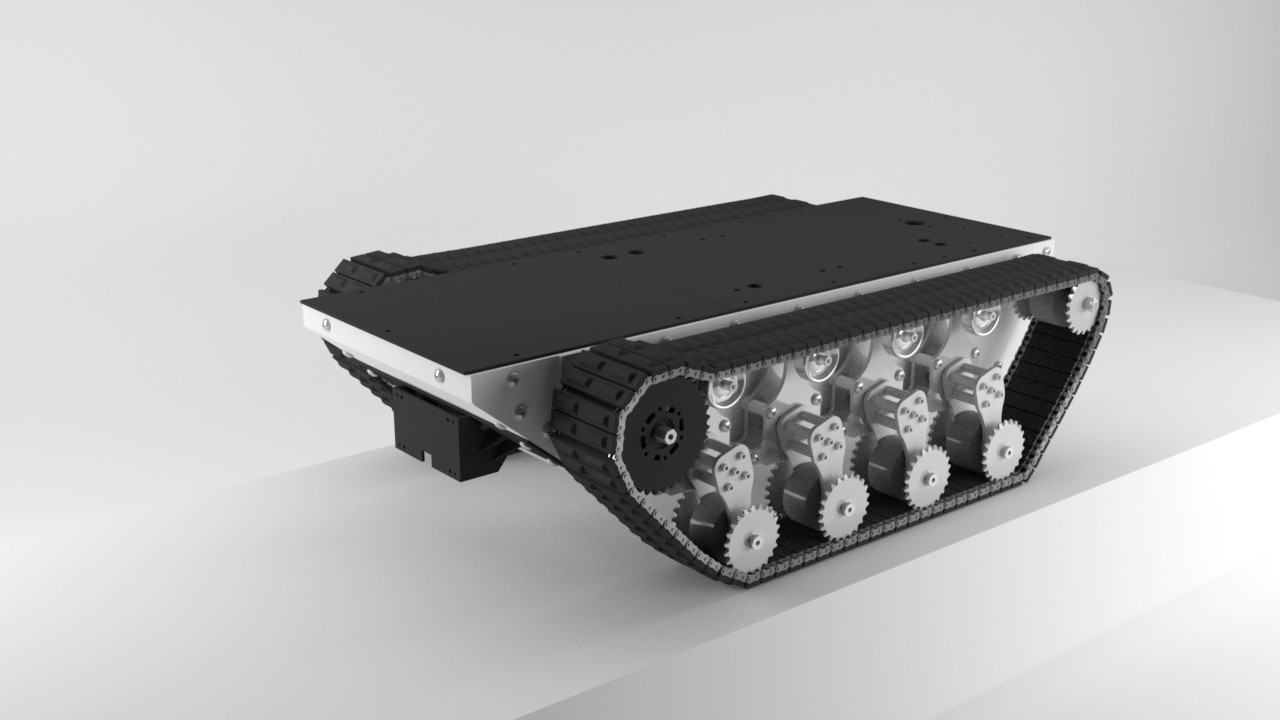
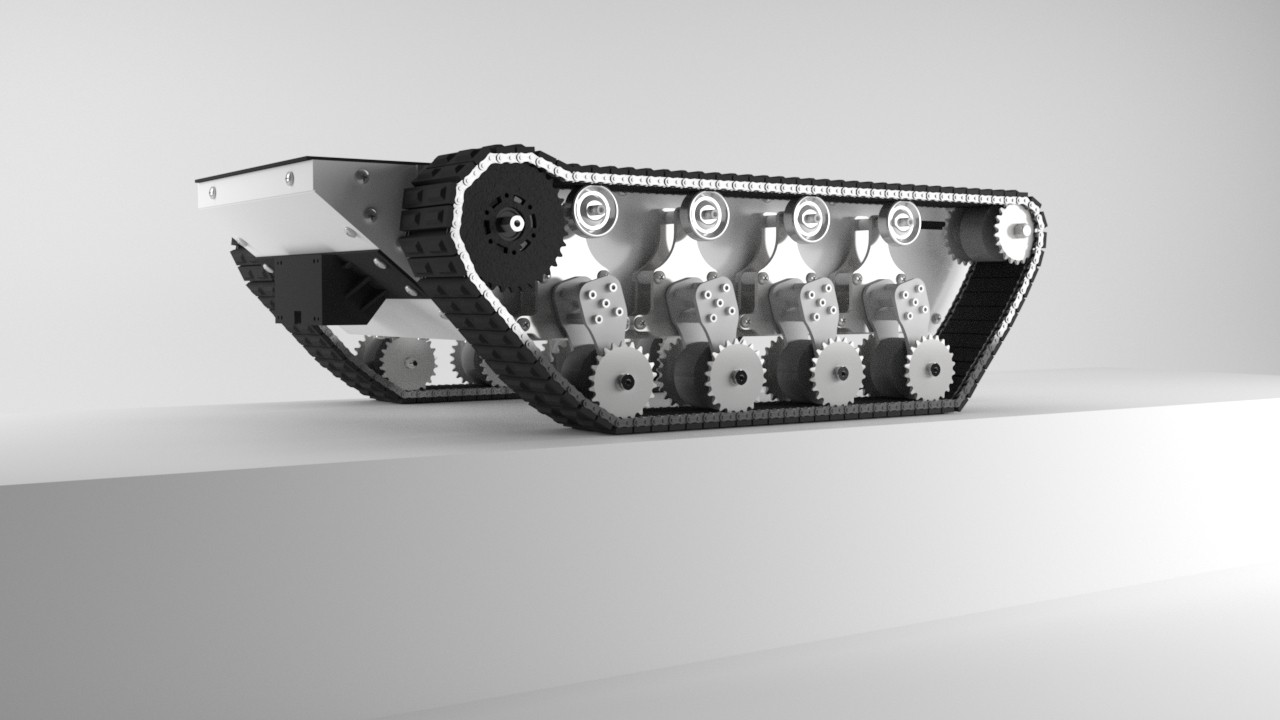
The biggest mechanical change is moving away from industrial conveyor belts (which work well on flat surfaces but are too slick to grip well) and use jupdyke's Modular Continuous Track System! I'm excited to get my hands on the new tracks and see how well they perform. Since I can use steel sprockets and have more control over the length of the tracks, they should help prevent the system from throwing tracks as often as it is now. Also, I should be able to go up wet hills!
I've also finalized the design for the new camera mount and laser-cut an abs prototype.
New renderings with improved tracks, sprockets, and the new camera mount:
On the electronics front I've installed OpenCV with OpenCL, OpenGL, TBB, and as many other optimizations as possible on the Odroid XU4, and have the obstacle detection algorithm running at 10 FPS. Taking a lesson from ROS and the embedded systems class here, I've tried break the system into smaller parts to make programming and debugging as easy as possible and have them communicate with each other with standard messages. Therefore, I have the Odroid XU4 doing the image processing and sending messages over USB to Teensy 3.2s which interface with the sensors and motor controllers. This way, I can program and test the motion control and planning, obstacle detection, and sensors interdependently.
Updated Block Diagram: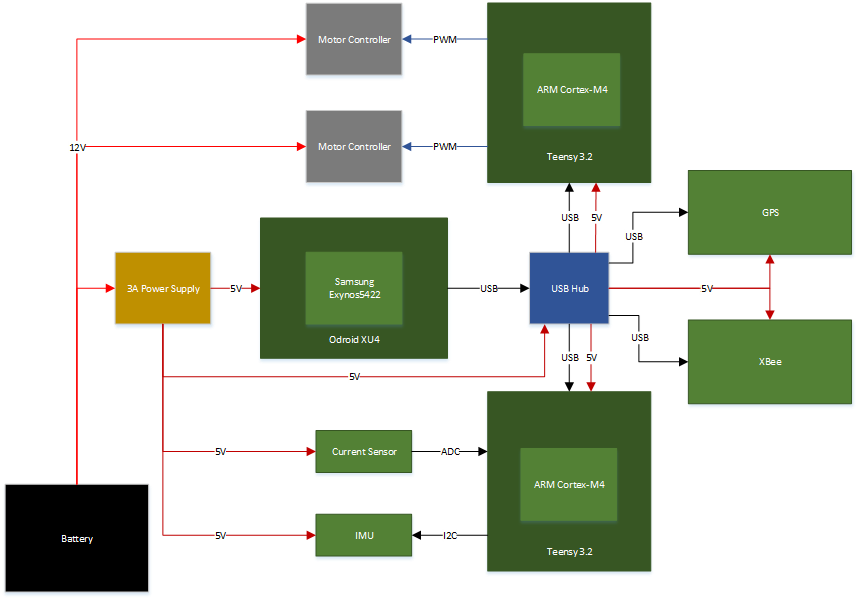
That is all for now.
-William
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.