 williamg42
williamg42In order to reduce friction and help with spacing, I ordered and installed oil impregnated bronze bushings for the sprockets, however it has not fixed the problem. My current working theory is the sprocket's teeth are not releasing from the chain and as a result are getting jammed in the chain links and pulled backwards, royally messing up the drive train and preventing forward movement.
The current fix (just to get the friggin robot to move) is to discard the sprockets (for now, I think they are the best solution, but sometimes excellence is the enemy of good enough) and use some oversized 3" washers and the spacers previously purchased to keep the chain captive. I've run a simulation and with two washers on each side, the maximum deflection due to a 100 lb-force load on the area where the chain is contained is .01" maximum. 
Which is good enough. I also managed to bend both the original rod, and the new one I ordered with the bearings.
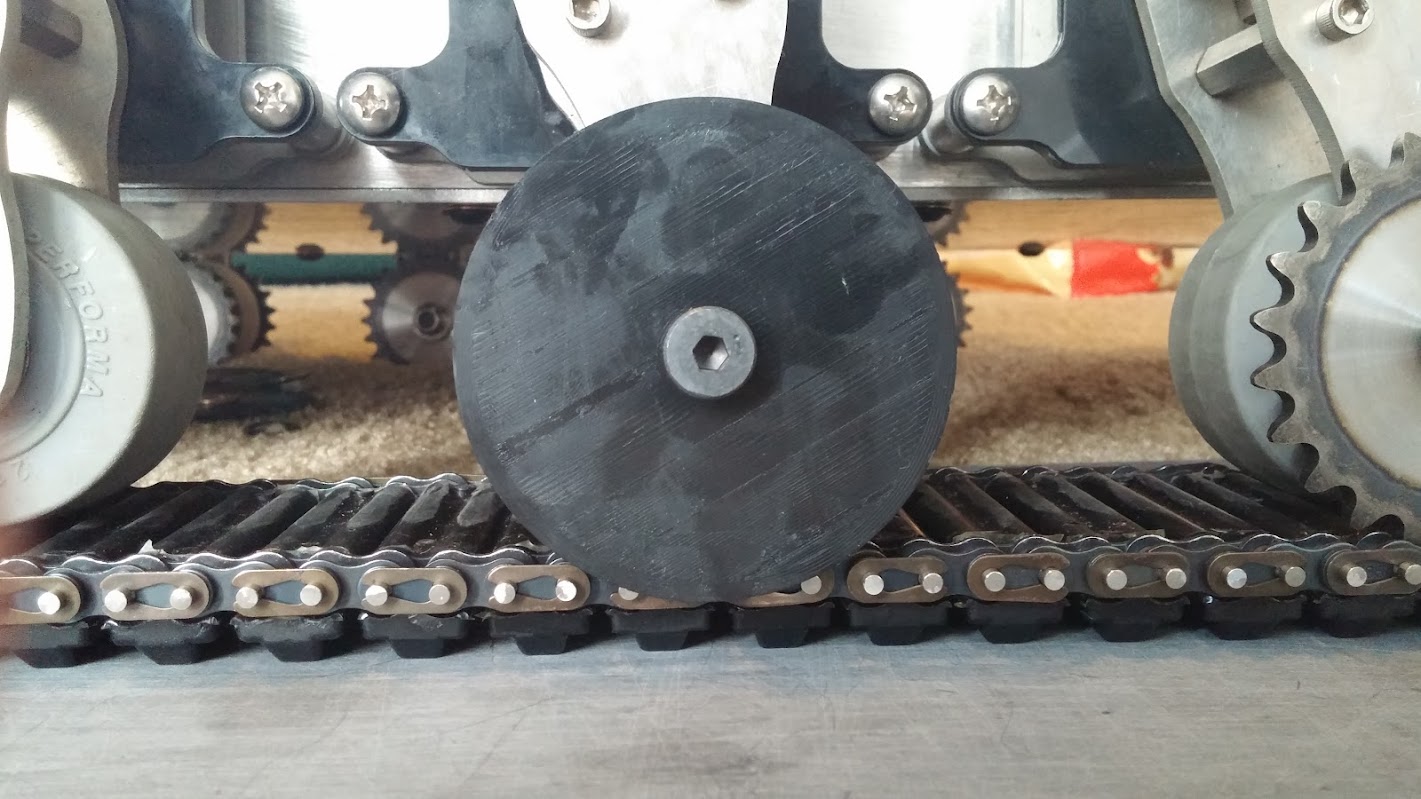
Here is the mockup of the 3" washer on the system.
And the washers came in fairly quick, so I've started working on installation. I also laser cut acetal copolymer, mainly because it looked cool and would help protect the aluminium from getting scratched.


That is all for now! Hopefully I will have time this weekend to replace the bad output shaft on the left gearbox, and finish attaching the washers to the wheels, so I can get this robot rolling again!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.