 Hari Wiguna
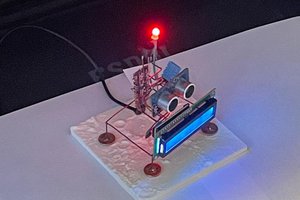
Hari Wiguna// Parking Helper
// by Hari Wiguna, 2015
// Heavily based on Arduino Ping example
const int ON = LOW;
const int OFF = HIGH;
// Distance sensor is HC-SR04
const int pingPin = 12; // TRIG
const int echoPin = 13; // ECHO
int prevBar = 0;
void setup() {
//-- Initialize led bargraph pins (D2..D11) --
for (int i = 0; i < 10; i++)
{
pinMode(2 + i, OUTPUT);
digitalWrite(2 + i, OFF);
}
//-- Initialize distance sensor pins --
pinMode(pingPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop()
{
// Send out a 5 microsecond pulse
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// Listen for that pulse to come back
long duration = pulseIn(echoPin, HIGH);
// convert the time into a distance
long cm = microsecondsToCentimeters(duration);
// Convert cm to bar graph
int bar = map(cm, 10, 70, 9, 0);
// only update bar graph if value changed
if (bar != prevBar) {
digitalWrite(2 + prevBar, OFF);
digitalWrite(2 + bar, ON);
prevBar = bar;
}
delay(100);
}
long microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}0%
0%
HariFun #114 - Parking Helper Project
Playing with one of the first Arduinos made in USA ( Parking Helper Project)
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 PJK
PJK
 Claus Buchholz
Claus Buchholz
Yeah, it makes the code easier to read and modify. You got to show me the finished project, take a video or do a show-n-tell at MakeShift!