 prateekt
prateektThe CyborgDistro is an open source project that allows anyone to build a multi-robot, multi-sensor cyborg. The CyborgDistro software currently runs on Raspbian on Raspberry Pi and interfaces with Android phones over sockets. The software can run on many different configurations of manipulator and sensor hardware.
We have prototyped two Cyborg hardware configurations:
Autonomous Cyborg Backpack: https://tandonp.wordpress.com/autonomous-cyborg-backpack/
Wearable MultiClaw: https://tandonp.wordpress.com/wearable-multiclaw/
----------------------------------------Autonomous Cyborg Backpack---------------------------------
The Autonomous Cyborg Backpack is a proto cyborg of the Distro. This cyborg has multiple robots -- many robot arms, grippers, etc. Additionally, it supports many sensor modalities such as sonar and camera. C and Java API libraries are provided with the Distro to control different sensors.


Watch the cyborg backpack in action!:
--Cyborg Hardware Specs--
- 2 Dagu 6DOF Arms
- SSC32 Servo Controller w/ custom enclosure
- Raspberry Pi 2 w/ portable USB battery and Wi-Fi dongle
- 2 Ultrasonic sensors on the sides of the backpack serve to detect obstacles and your phone beeps if you get close to something. This helps you protect the extra arms from damage.
- 2 Web Cams mounted on the backpack help you see behind you! GoPro has it backwards.
- The backpack is completely controllable via an Android application that lets you move the arms and see sensor output in real-time.
- Tekkeon External Battery for powering the servo controller.


--Cyborg Software Specs--
The GitHub repository (https://github.com/prateekt/CyborgDistro) contains four directories for useful code.
- RealTimeSystem - Python Scripts and compiled jars for running the system. Includes the Python CameraServer and SonarServer for automating these USB sensors. Looking at this folder is the best way to get off the ground and get a running Cyborg system.
- ServoControlServer - Server that runs on Raspberry Pi to control Servo Motors. Interacts with Android App over sockets to allow user to send commands to the robot from their phone.
- CyborgApp - Android App Project that allows a user to control the Cyborg. The Android App supports real-time visualization of the incoming sensor data. It allows the user to control and send commands to the servo motors to move the arms.
- Sensor API - C APIs for various popular off the shelf sensors. This is derived from my blog post (https://tandonp.wordpress.com/2014/10/11/python-sensor-libraries/). You can easily use Python CTypes to automate obtaining data from the sensors in high level python. In fact, the entire higher level logic of the system is written in Python and Java at the end of the day, but we can also control the low level polling details of sensors and actuators in C if we need to.
---------------------------------------------Wearable MultiClaw--------------------------------------------
The Wearable MultiClaw is another Cyborg that is almost ready for human consumption! The slide-on Wearable MultiClaw can go anywhere you need a couple helping hands. Perhaps you’d like to carry some additional items on your arm. Or maybe on your feet.
Watch the Wearable MultiClaw in action:
The hardware and software used to build the device are highly scalable and cost-effective.
- The grippers are $5 grippers from SparkFun. Never before has having lots of grippers ever been so affordable (which is subsequently spawning this multi-robot cyborg revolution).
- Pololu Micro Maestro Controller ($20), the Raspberry Pi ($35), along with some batteries.
- The grippers are mounted on inexpensive ($5) fitness wristbands.
- Code for your MultiClaw in Python or using the Pololu Maestro language!
With all slide-on these robotic actuators and sensors, you will be able to manipulate the world at your fingertips -- or claw tips!
---------------------------------------------Plan for the Cyborgs-------------------------------------------
Multiple robots augmenting a human? ? You don’t have to wait until 2050...
Read more »



 Petar Crnjak
Petar Crnjak

 therobotstudio
therobotstudio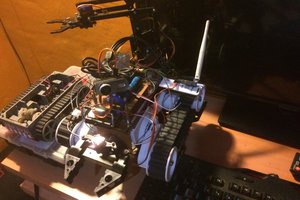
 Rishaldy Prisly
Rishaldy Prisly