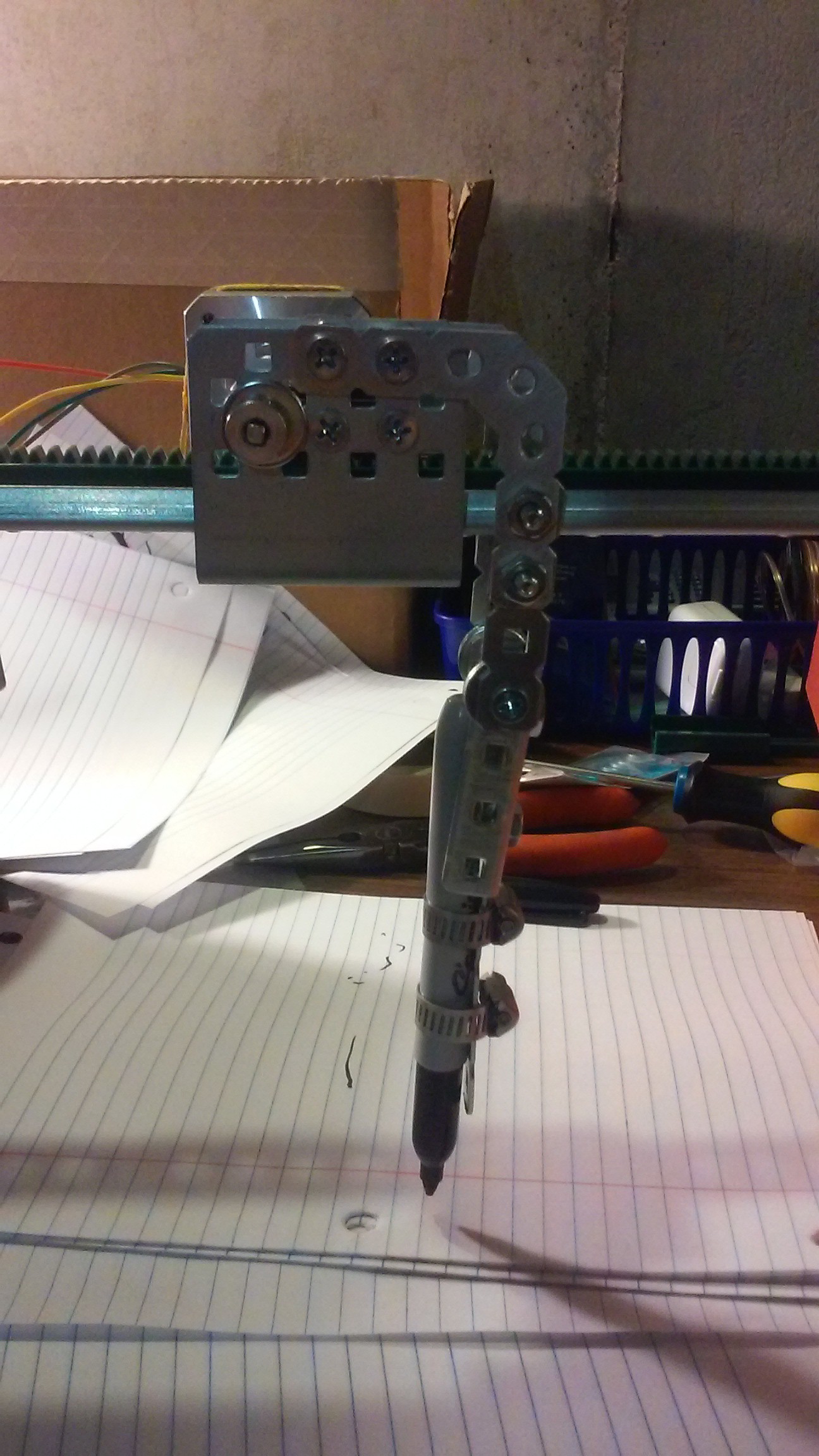
During the initial design stages of the SpiroBot, the issue came up of how the robotic "arm" was to hold the pen. Our particular design required that the pen be able to move vertically to adjust to small irregularities in the height of the platform and drawing surface. Upon doing some research, we found that previous drawing robots used a variety of mechanisms to hold the pen, including adhesive backed cable clamps, rubber bands, and a robotic gripper. However, we found that the easiest method for holding the pen was to use hose clamps, that way the grip would be firm, but easily adjusted to fit any pen or marker.
The initial design had the entire arm swinging up and down about an axis near the top. After building this, though, we quickly found this idea unfeasible, since the pen would dig into the paper and jam the machine when the pen was pushed instead of dragged. Instead, we locked the arm in place and loosened the hose clamps so that the pen was free to move vertically, but was restricted from large movements in other directions.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.