 Matthew Borgatti
Matthew Borgatti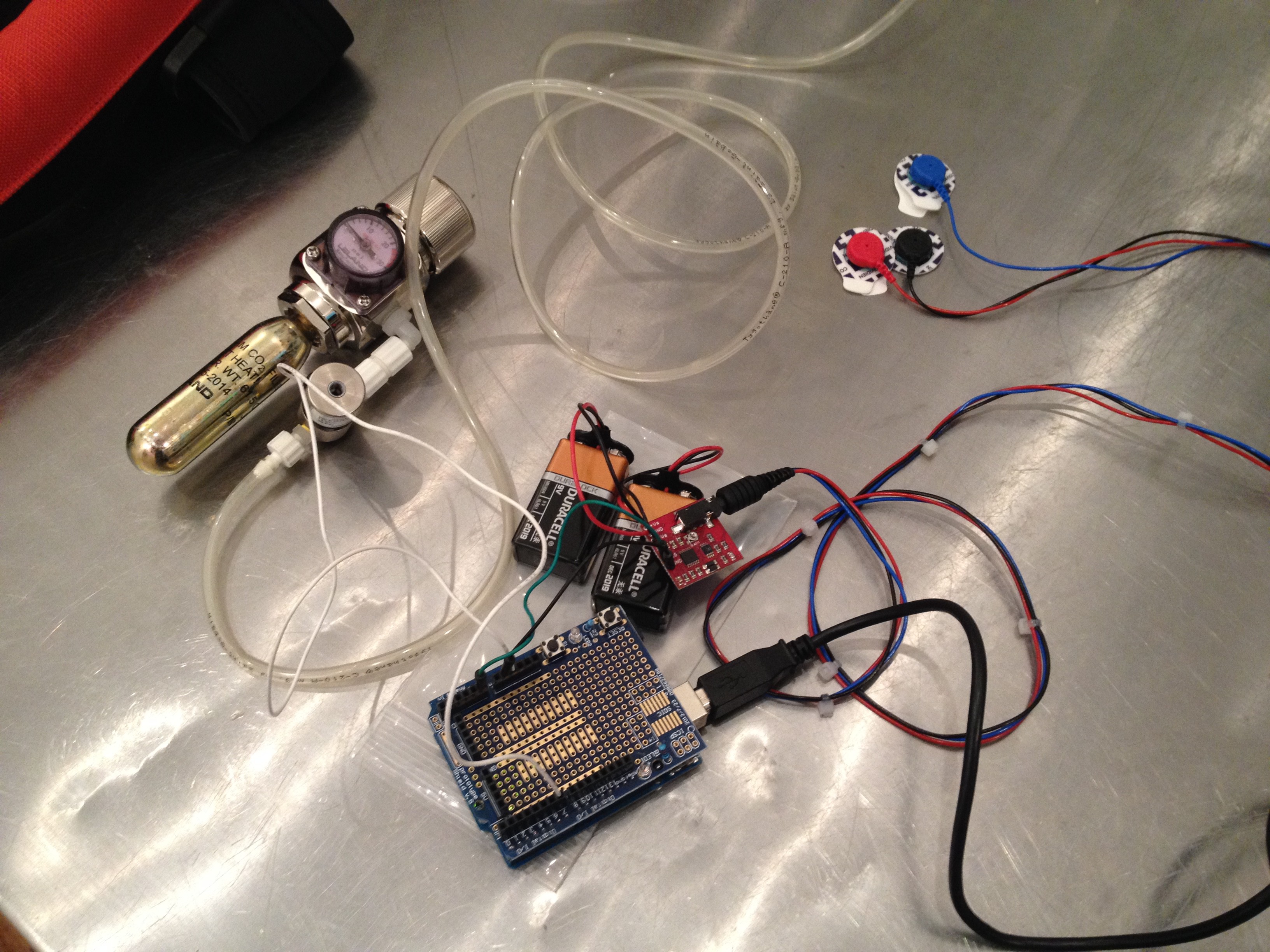
I'm still trying to get optimal output from my myoelectric sensor, but the above pictures shows the general architecture of the brains of the Neucuff. I've chosen components that don't need a ton of power and could conceivably run for a week off of a single charge of a cell phone battery. Ideally if this device eventually survives the gauntlet of medical evaluation, pilot testing, medical trials, and FDA certification all of the electronics involved can be minimized into a tiny board that can tuck up inside of a package that contains a minimal regulator and the valve.
The current setup I'm using is a Leiland CO2 regulator with 16g cartridges hooked to a GEMS 12VDC 3-way solenoid valve. The valve is actuated by a signal coming from an Arduino stepped up through a Leivin DC amplifier (not pictured). I'm getting signals from my bicep (technically we'll need to be monitoring the triceps for the "elbow bend/extend" signal but the bicep is easier for testing) via an Advancer Technologies Muscle Sensor V3. The goal is to PWM the valve to achieve the right level of air in the actuators to reach the degree of rotation we're looking for from the elbow. Over time this may require integrating stretch sensors into the cuff to close the loop but there needs to be some more testing before we can make that call.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.