 Kate Reed
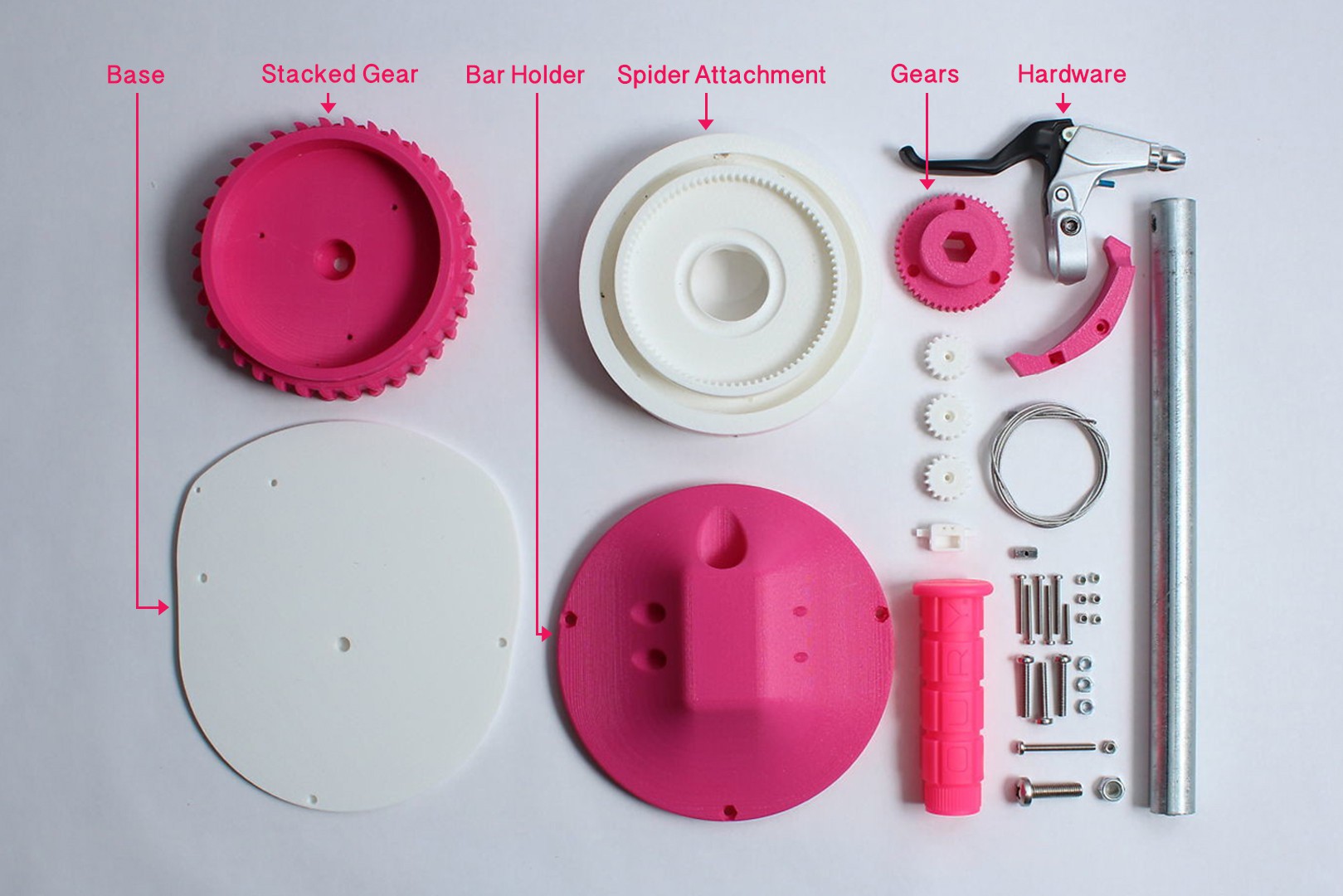
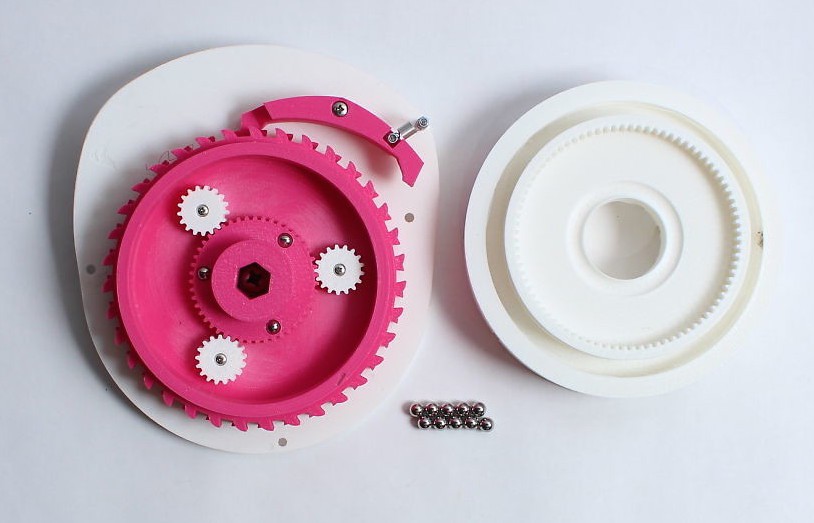
Kate ReedOur Hand Drive wheelchair attachment uses a dual ratchet mechanism. One ratchet is naturally engaged by a spring and moves the wheelchair forward as you pump the handles. To move backwards, the user squeezes the brake on the handlebar which disengages one ratchet and engages the other, and the wheelchair moves backwards.
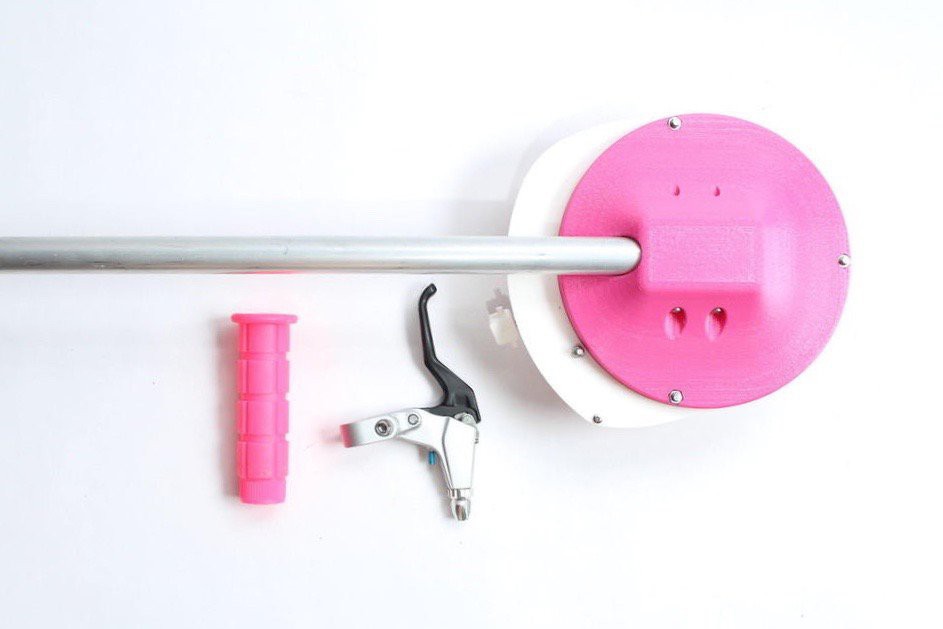
Because it is open source, it can be adapted for individual user's needs. For instance, if the user is a child and they have smaller hands, they can adjust the handles and handlebar length to fit. If the user has unusual wheels on their wheelchair, then they can adapt the attachment piece so it can fit snugly on their wheel as well.

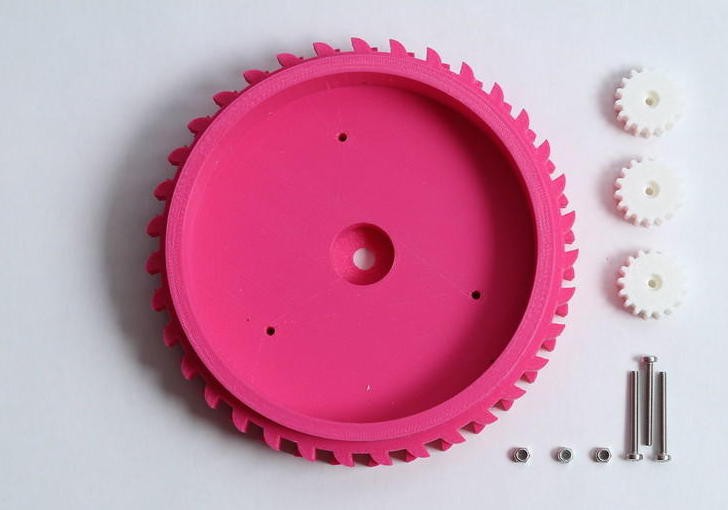
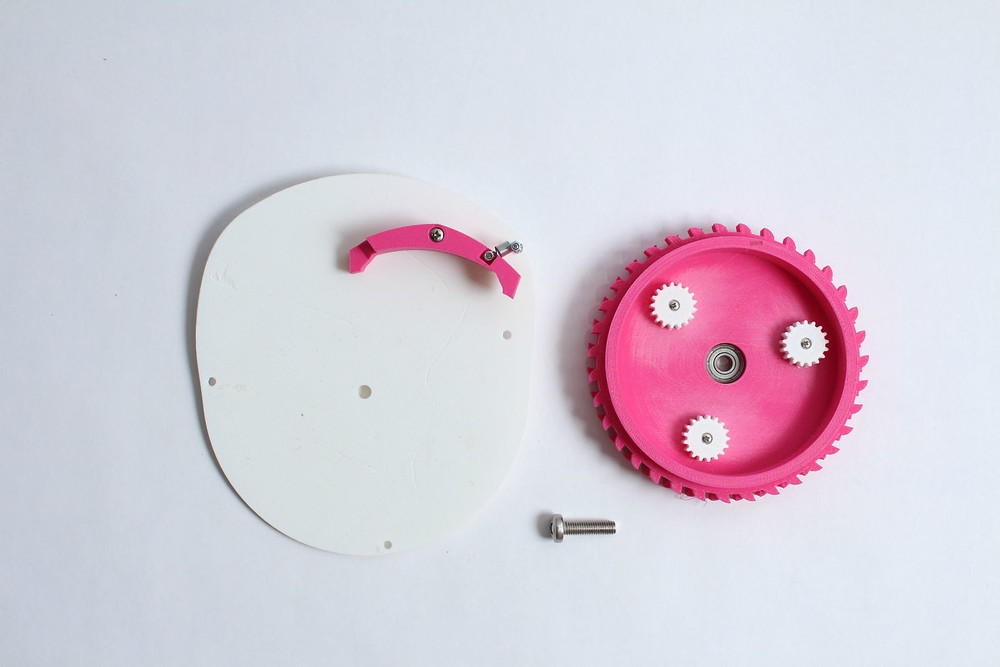
 3)Take one M3 20 mm and put it through the ratchet. Sandwich the spring in between the ratchet and the M3 lock nut on top.
3)Take one M3 20 mm and put it through the ratchet. Sandwich the spring in between the ratchet and the M3 lock nut on top.




















 Jason Bender
Jason Bender
 Sam Baker
Sam Baker
 Joseph Prosnitz
Joseph Prosnitz
 Colin Kingsbury
Colin Kingsbury
Hi all,
If anyone can point me in the right direction to be able to print this out, I'd be very happy and my Dad would be even happier. He is in a wheelchair with Parkinson's and his shoulders get very sore just going around the hospital floor. I live 6 hours away and can't take him out, and my Mom isn't in shape to take him out in the good weather without help.
This would allow my Dad to help my Mom and get out further than just the sidewalk around the hospital.
I have tried getting a hold of Nathaniel but he has not responded either and the link you supplied much earlier in this thread does not contain the .stl files.
Please- before the Canadian winter sets in?
Thank you