 indream
indreamMe USB Host's Features:
- Main chip: CH375B
- Supported device: HID device whose descriptor is shorter than 64 bytes
- default baudrate is 9600
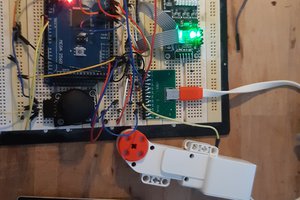
mCore ( Arduino Uno based ) can communicate to me usb host with software serial, because there is not RJ25 Port for hardware serial in mCore.

the processing : DC Motor <-- mCore <--> USB Host <--> USB 2.4G Dongle <--> Wireless Joystick

 gihad
gihad

 Dave Ehnebuske
Dave Ehnebuske