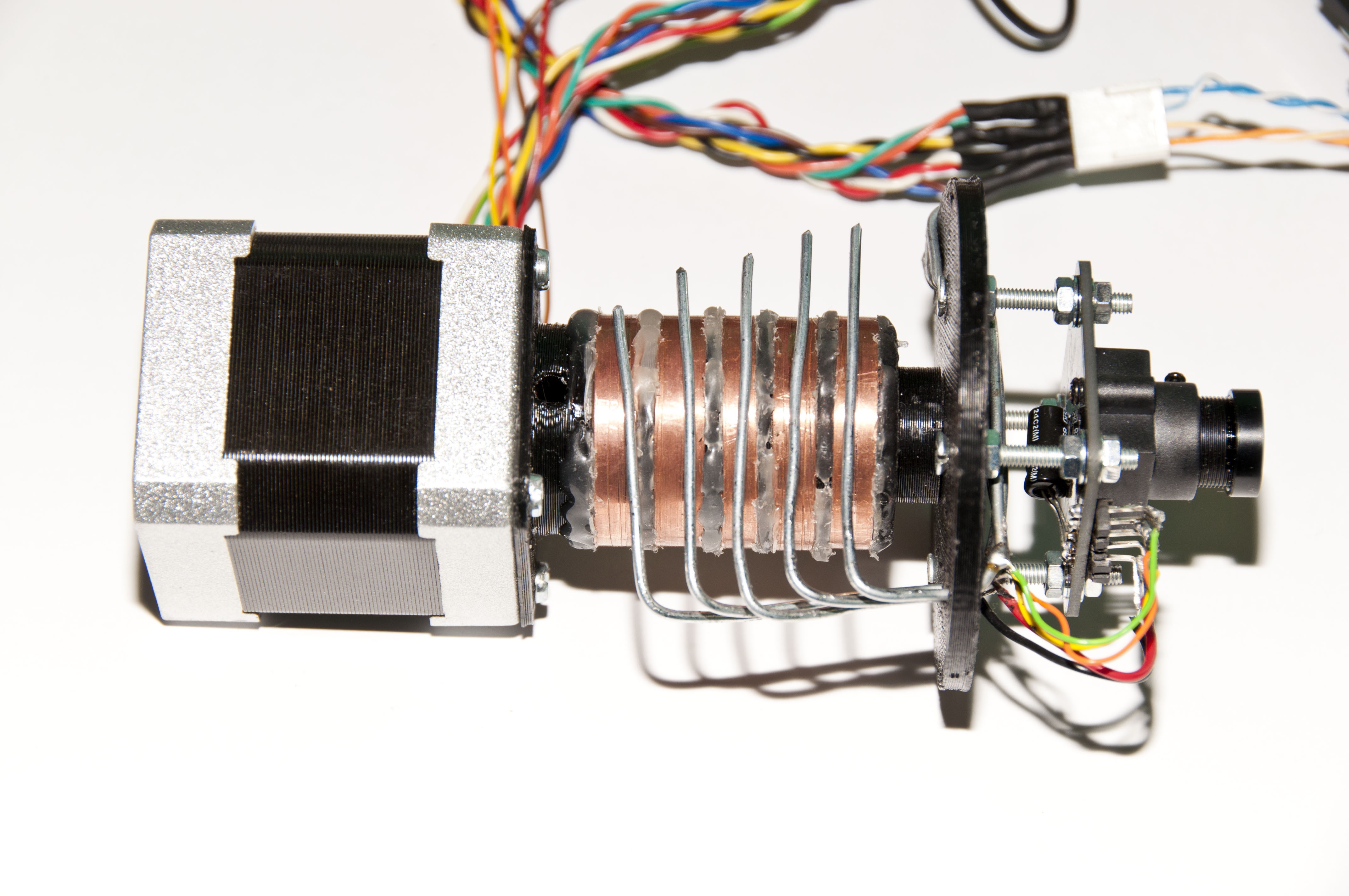
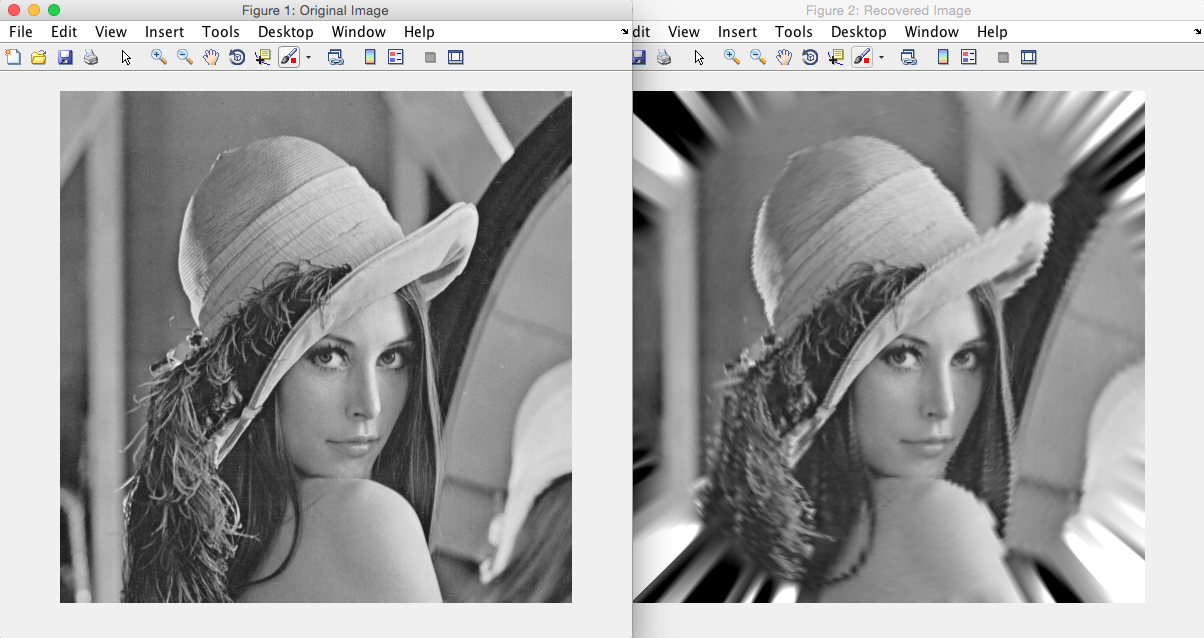
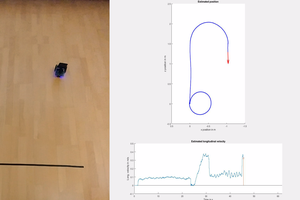
Multiple approaches will be attempted in order to achieve the desired purpose. The first approach will involve a Linear Sensor Array (LSA) capturing light in a radial pattern around a centre and then interpolating the data to obtain an image we can display on a regular rectangular screen.
The second approach will also utilise an LSA, but rather than spinning it, we will move it back and forth on a set of rails. More details to come.


 A video simulation will be shown soon.
A video simulation will be shown soon.

 SerialSensor
SerialSensor
 AIRPOCKET
AIRPOCKET
great work, wont it be better if you use professionally made slip rings ( available all over aliexpress ) and also use a coupler on the motor to get rid of vibrations... also a sensor from a scanner can be also used to give much better resolution i guess.