 Hooptie J
Hooptie JSpent some time today working on the wiring and software side of the bot.
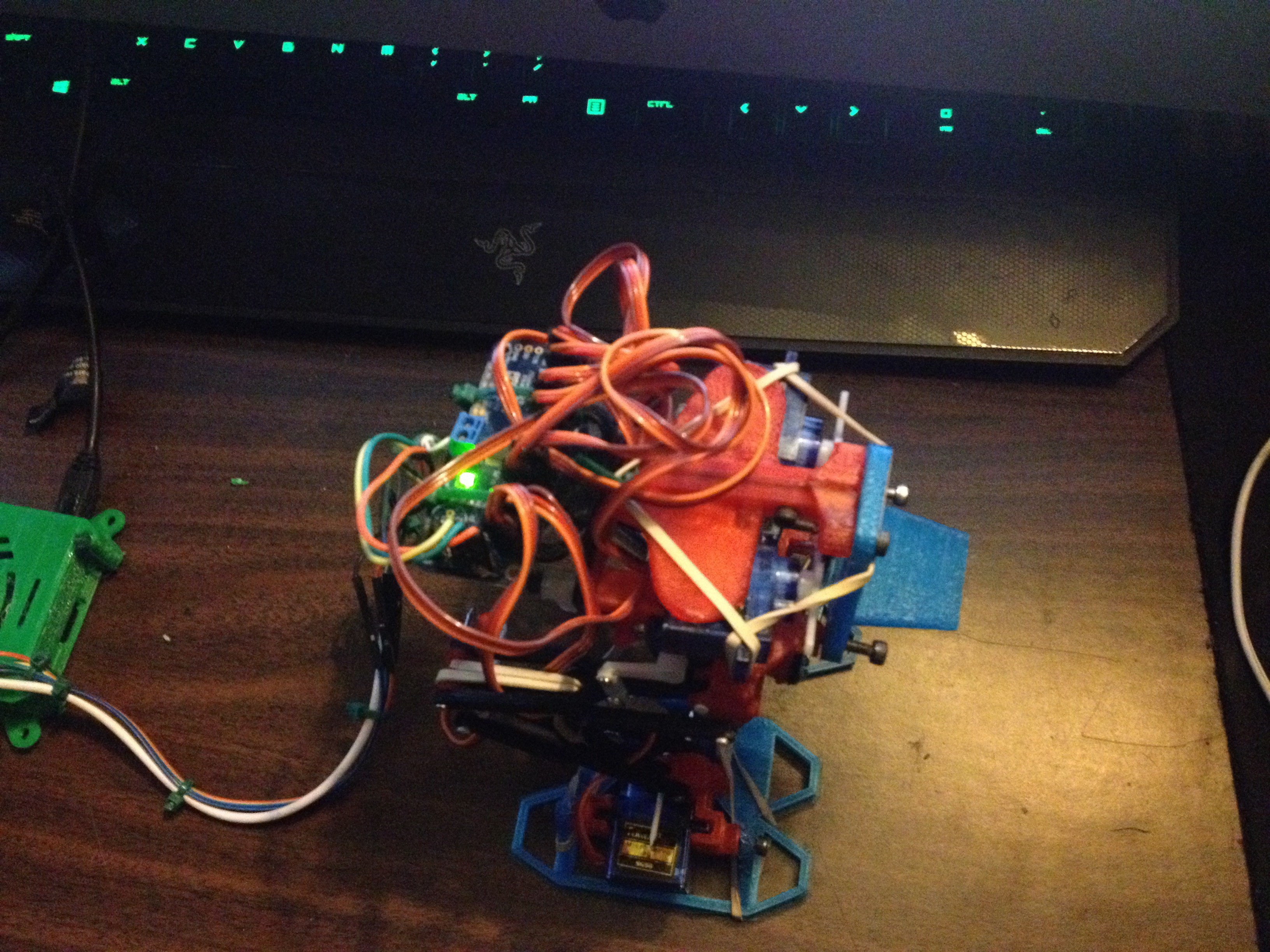
I've hooked up my Raspberry pi along with an Adafruit I2C Servo controller to get some basic range of motion and movement checks.
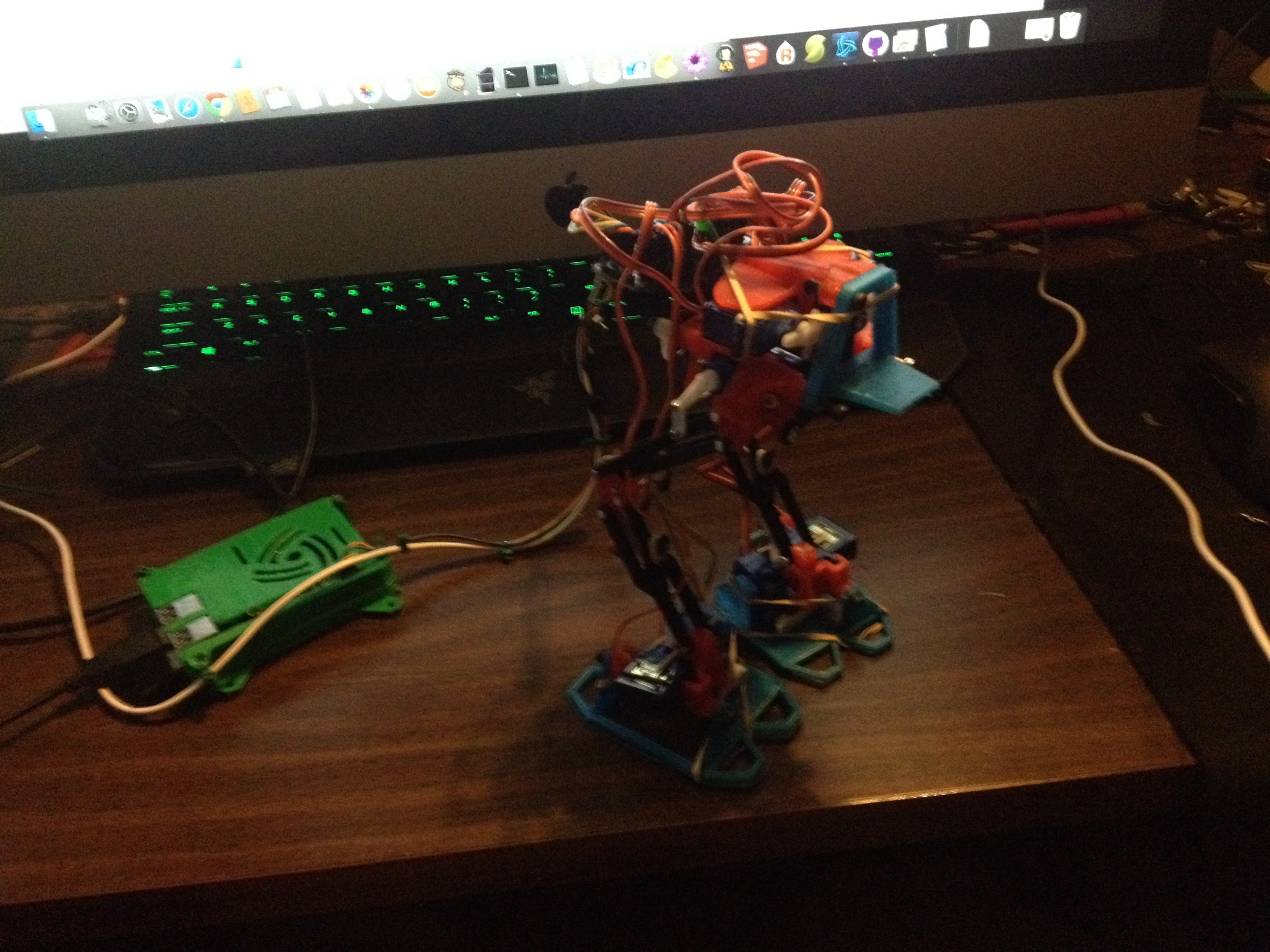
Everything looks Pretty good, Standing on its own power, and able to crouch lean, etc -BUT.
Chassis side I need some minor revisions:
- on the feet, there's an issue when all the weight is on one foot, it flexes the servo horns just enough to snap out of place from the bottom of the ankle, and it falls back onto both feet 1/2 the time, it can only stand on one foot when this works... - pondering the right "fix" for this- may need a bigger revision of the foot and ankle attach.
-On the "waist" servos - They definitely need a brace, as the servos promptly stripped out their mounting screws and started getting floppy- a rubber band was enough tension to keep it all functioning, but a small brace/battery rack is likely coming soon.
- on the legbones, there's some range of motion issues when it comes to fully "tucking" the legs, ended up breaking a "femur" side inner legbone from it. Easy fix though, just need to angle the "tendon hooks" 45 or so.
 Also, i didnt print any spare leg bones last revision, so this ends Range of motion testing for the day.
Also, i didnt print any spare leg bones last revision, so this ends Range of motion testing for the day.
On the Software side - i got a BUNCH done-
Test app for the walker in python, uses a USB gamepad for input, basic UP/Down , Lean Left/Right, No animations , but got a stable workable input for testing.
I'm currently limiting the speed on the servos- 3deg/sec slow - i took a video but it was godawful boring to watch, movie magic later....
walking will be static animations to start, then down from a few steps to procedural half steps eventually.
For now, part redesigns and printing replacements should keep me busy for a few days at least.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.