 Paul Wagener
Paul WagenerThe software running on the Raspberry Pi is responsible for driving the Rover around. But with 10 distinct servo's controlling the wheels we need some smarts to drive around.
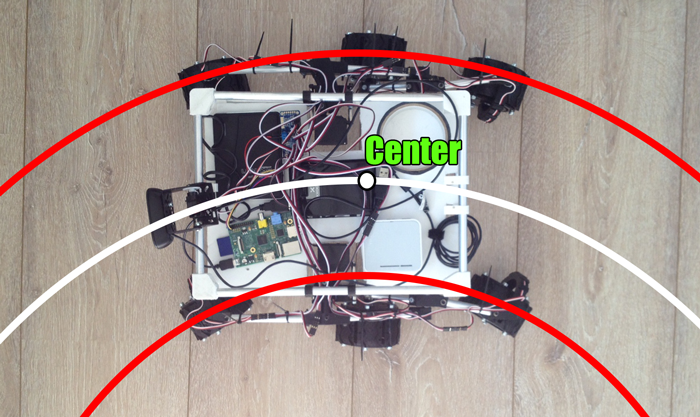
The software takes two parameters as input: A driving speed and a turning radius. All the wheels are in different positions so they all need to be driving at different angles and speeds to prevent the wheels from slipping. Just like with a car, the wheels on the inside track need to drive more slowly than those on the outside track.
To solve this the wheels are angled to drive along imaginary circles. This makes the rover drive gracefully around every obstacle.
In our test drives we found out that the rover is capable of some very sharp cornering allowing the platform to navigate tight spaces with relative ease.
Next step: rotating in place.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.