 Les Hall
Les Hall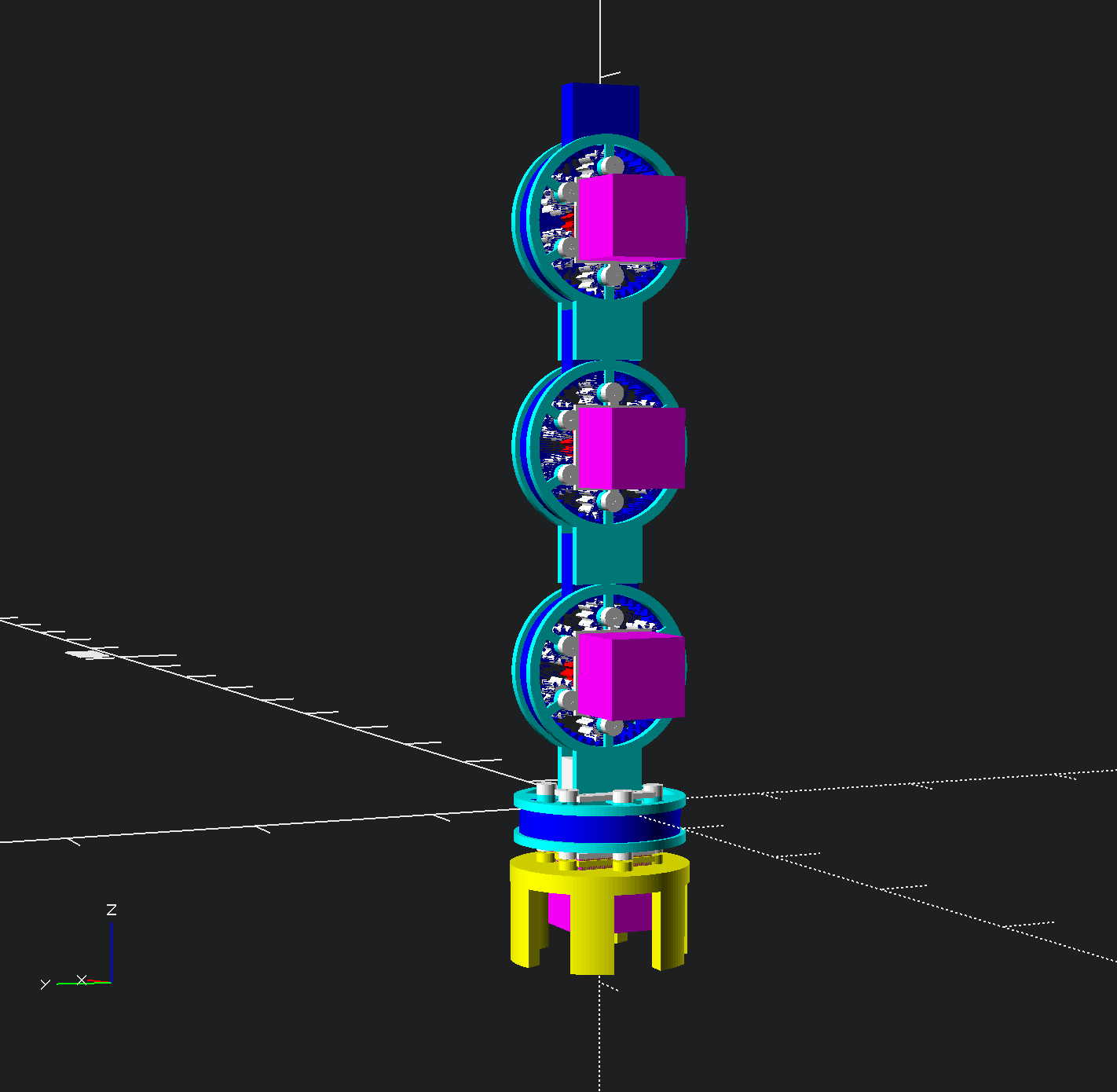
I realized a simplification in Ivan's construction by thinking about the bearings. These are 3D printed all-plastic bearings made of planetary gear sets, most notably AVA's Gear Toy 2 which you can view here. That's a two-to-one gear reduction from innermost "sun" gear to outer gear with the inward facing teeth. The other six are the planet gears.
I spent a lot of time cleaning up the file, parameterizing it better, and adding the robot parts including NEMA 17 motor mounts, frames, arms, joiners, and base. It still has no actuator. It's already pretty top heavy with the tallest motor at 0.3 meters from the base, so I think it will wobble a bit. It has the advantage that almost and possibly all of the parts I already have, owing to it being almost entirely plastic. I have the motors and the control electroinics. I may need a power supply.
The other neat thing about this robot is that since it's so printer-heavy-usage, I can make lots of them. outfit them with different motors and make them different sizes, what not. Looking forward to playing with this robot!
Les
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
actually if i knew what i was doing there would be less creativity and more directivity, lol. This is fun though!
Are you sure? yes | no
thank you kind sir! :)
Are you sure? yes | no
So many ideas coming from this man!
Are you sure? yes | no