 Les Hall
Les Hall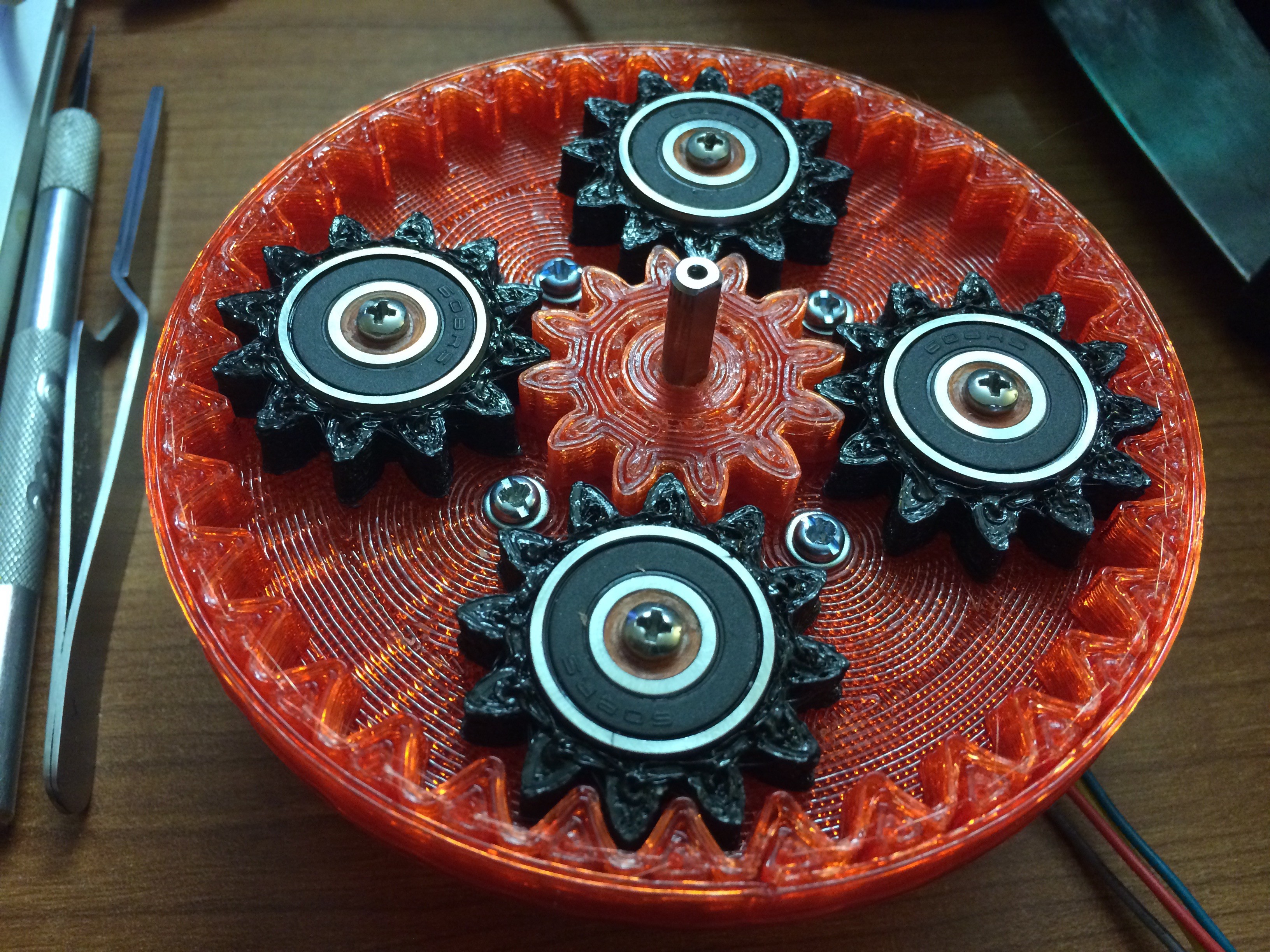
The photo above shows Ivan printed with a 0.75 mm nozzle for strength and speed, plus his new design has 608ZZ standard skateboard bearings on the planetary gears and filaflex teeth on the same planetary gears. The flexi teeth are better than plain old PLA, especially when mated to PLA as shown, however there is a better solution: nylon. I plan to order some nylon-ish filament from www.printedsolid.com, the Taulman alloy 910. The bearings have two washers under them to "float" them above the surface of the support disc so that the flexi-gears will spin freely without gripping the surface.
At this point I am open to suggestions on how to proceed with the design in terms of an orthogonal rotation arm, a slip ring possibly made of graphene filament, and the base stand. Let's make our suggestions in the comments and decide where to go from here!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
I propose a complete change of design! I propose a 3D printed solenoid-based tentacle design! This is a FORK in that we have the original design to incorporate or separately use as another Ivan (Ivan has many incarnations), and that a new BRANCH is under development. The concept is simple
Use Magnetic iron filament as the core of a solenoid design. Use magnet wire wound on a bobbin for each solenoid. Drive each solenoid with a digital bit. Use three or four solenoids per segment. reduce size and length of segments along the tentacle's length.
It's a great opportunity to test out Magnetic Iron filament. I'd like to make the conductors out of Graphene if possible! What do you all think?
Les
Are you sure? yes | no
sounds neat! I always loved tentacle designs, have to make one myself someday.
Are you sure? yes | no
that's two votes for yes! So I am proceeding. I'll add a log entry with a photo of the OpenSCAD file that I have prepared for a tapering tentacle design. I like how the wires just run down the middle in this design, and it lends itself well to both distributed and central controls. My printer is capable of printing flex, magnetic iron, and carbon fiber so I guess those will be our three materials. If I could think of a way to print a coil with the graphene i would...
Are you sure? yes | no
Agreed Frank, and really going beyond 360 degrees is mostly unnecessary. I really would enjoy the challenge of creating my own slip rings using the free sample of Functionalize Graphene that I have, however That's asking for trouble really. I'll just use a 360 degree limit at least for now unless anyone else chimes in. OK then, next thing is to figure out how to mount the second motor!
Are you sure? yes | no
I was hoping more people would voice up. If it was me. I would go for a coiled cable for the rotation, but maybe that's not the only solution.
Are you sure? yes | no
If limited to 360°, the pitfalls of making your own slip rings could be avoided.
Are you sure? yes | no