 deʃhipu
deʃhipuSo I dug out this project. I never actually intended to abandon it for so long, but somehow that's exactly what happened. Today I started preparing for the PyCon.PL confernece, and looked at the shelf, and there it was. We are going to do some Micro:Bit hacking at the conference, and I thought: "Hey, it's a good thing to connect a Micro:Bit to!" So I took it out, blew the dust from it, replaced two broken bolts (those acrylic bolts are delicate when you tighten them too much) and added a bunch of wires to the servos:
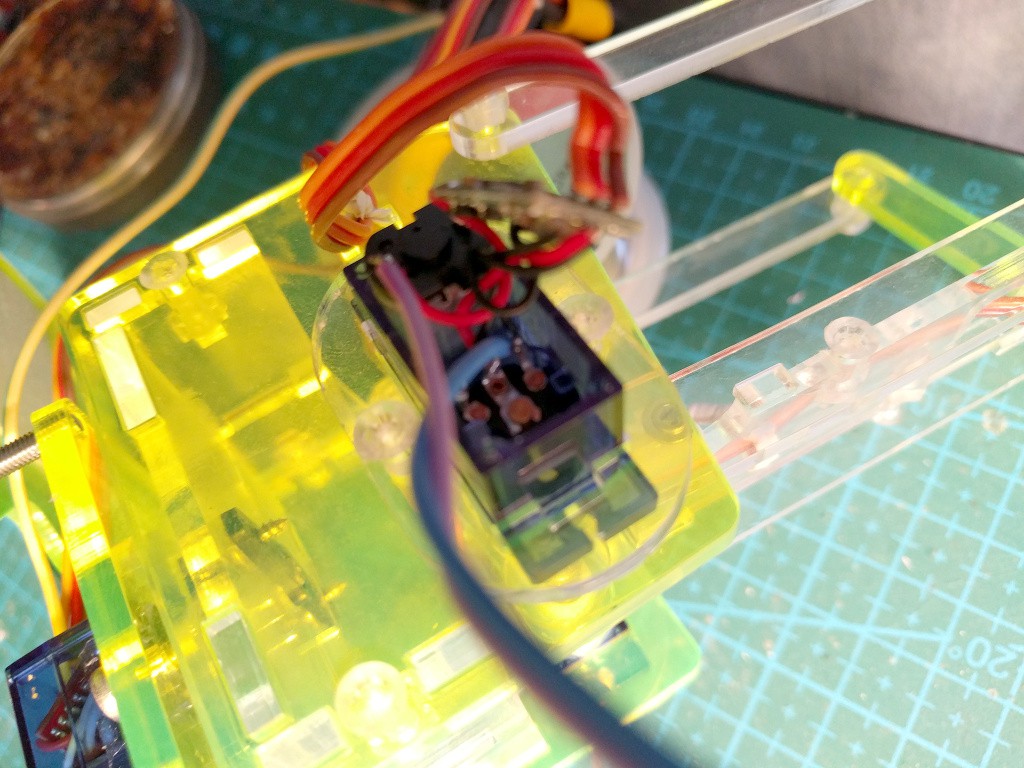
Every servo has now two extra wires: one going to the center tap of the pot, and one going to the motor. Why? Because I want to be able to do position and force sensing! Probably not right now and not with the Micro:Bit, but I really want to do some experiments with complain motion and such.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.