 Eric Hertz
Eric HertzThe sled-motors in most DVD-drives are usually Bipolar Stepper Motors. These are stepper-motors with only 4 wires (whereas Unipolar Steppers usually have 5 or 6 wires).
In a bipolar stepper, the wires are paired-up to electromagnet-windings. But the separate pairs are not connected to each other (again, unlike a unipolar stepper).
One way this is often viewed is thusly:
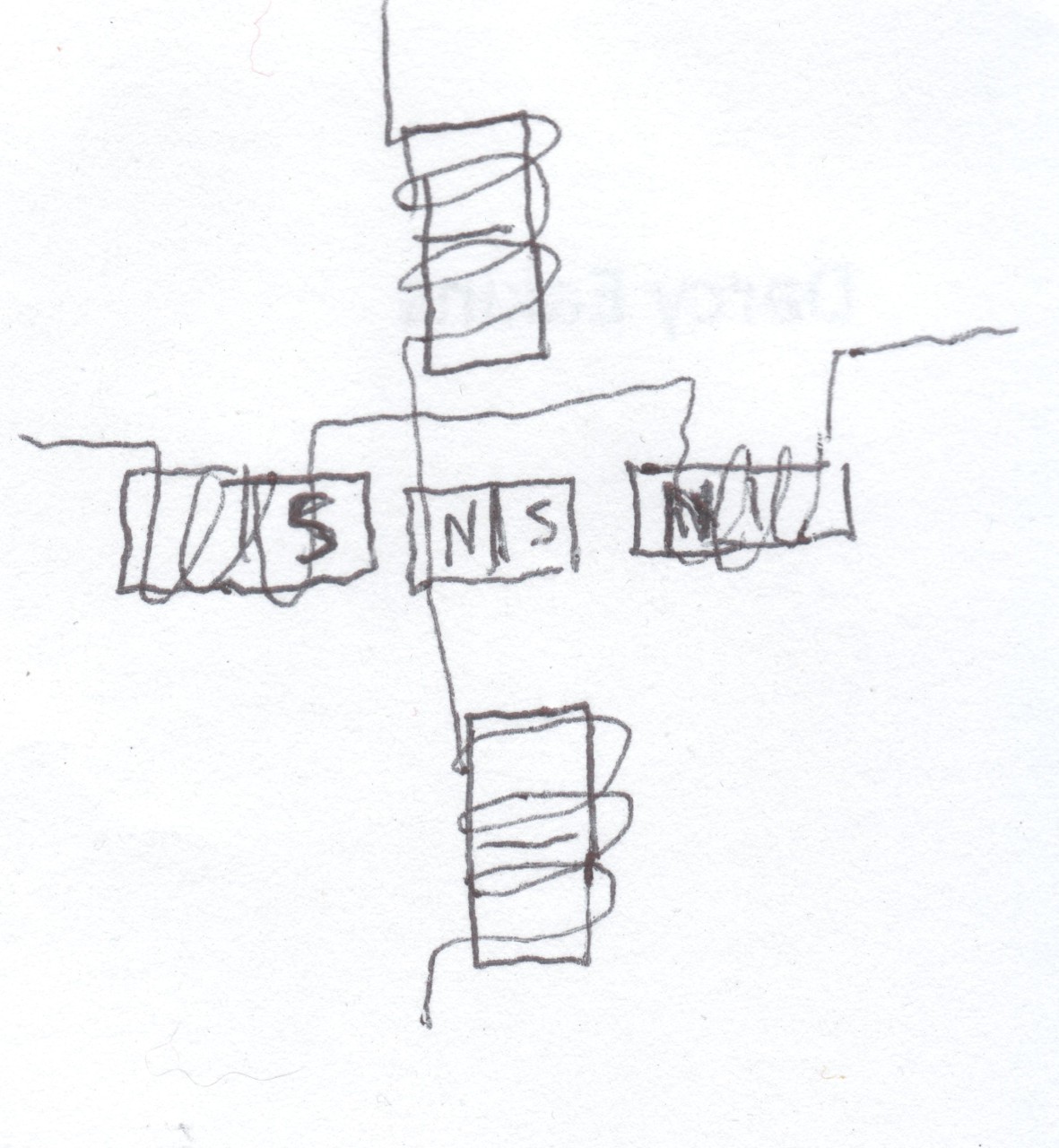
So the motor's shaft is attached to a fixed-magnet with North and South poles, and opposite electromagnets are paired together.
Right.
So, it might be apparent from that picture that for this simplified motor to rotate 180 degrees, the polarity of the horizontal-windings must be reversed... Thus "bipolar" requiring the voltage applied to the windings to switch polarity in order to create motion. (These windings are often called "phases").
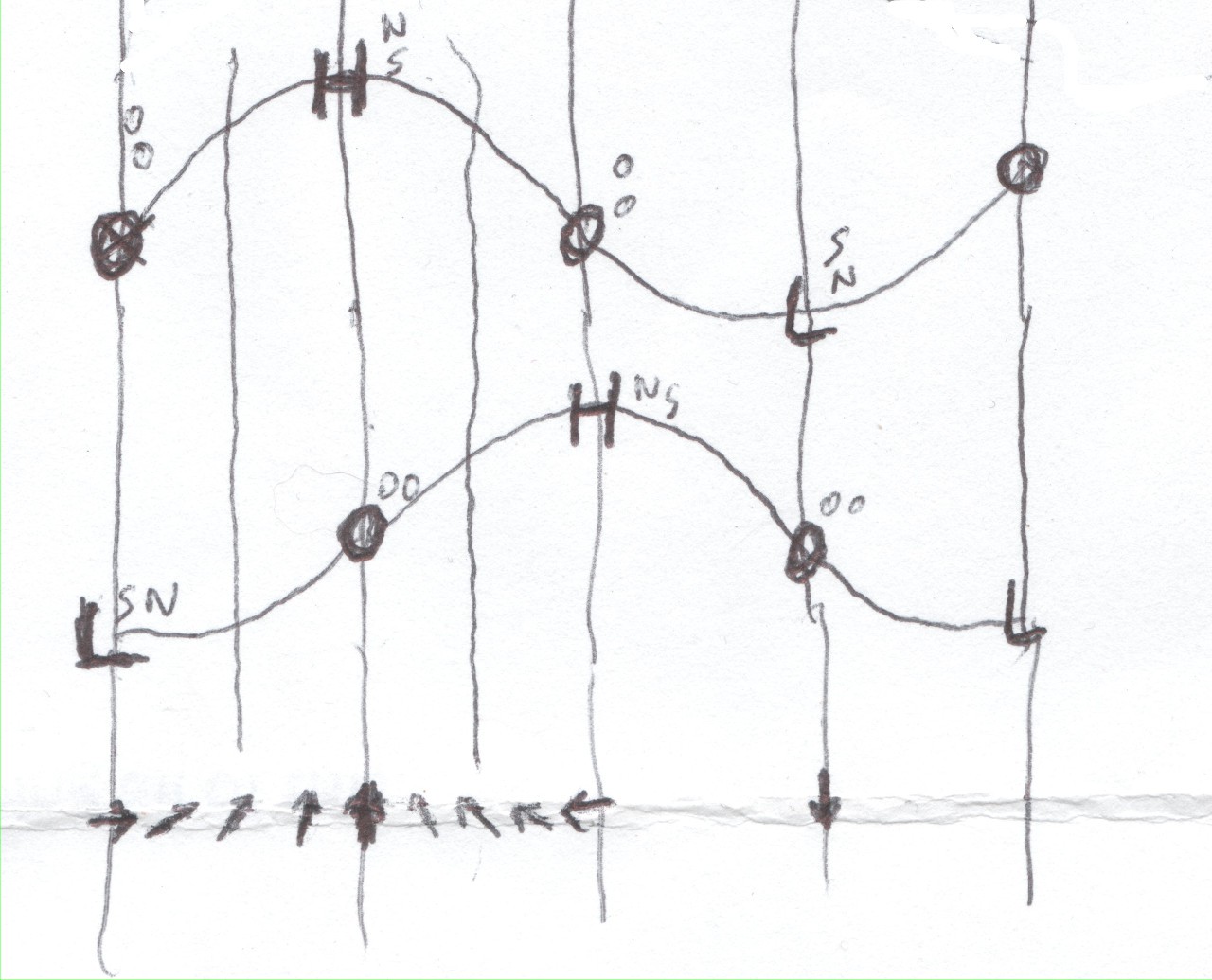
Now, as I understand, the typical way to drive a bipolar stepper with "single-stepping" is to use two square-waves 90-degrees out of phase. Quadrature, essentially.
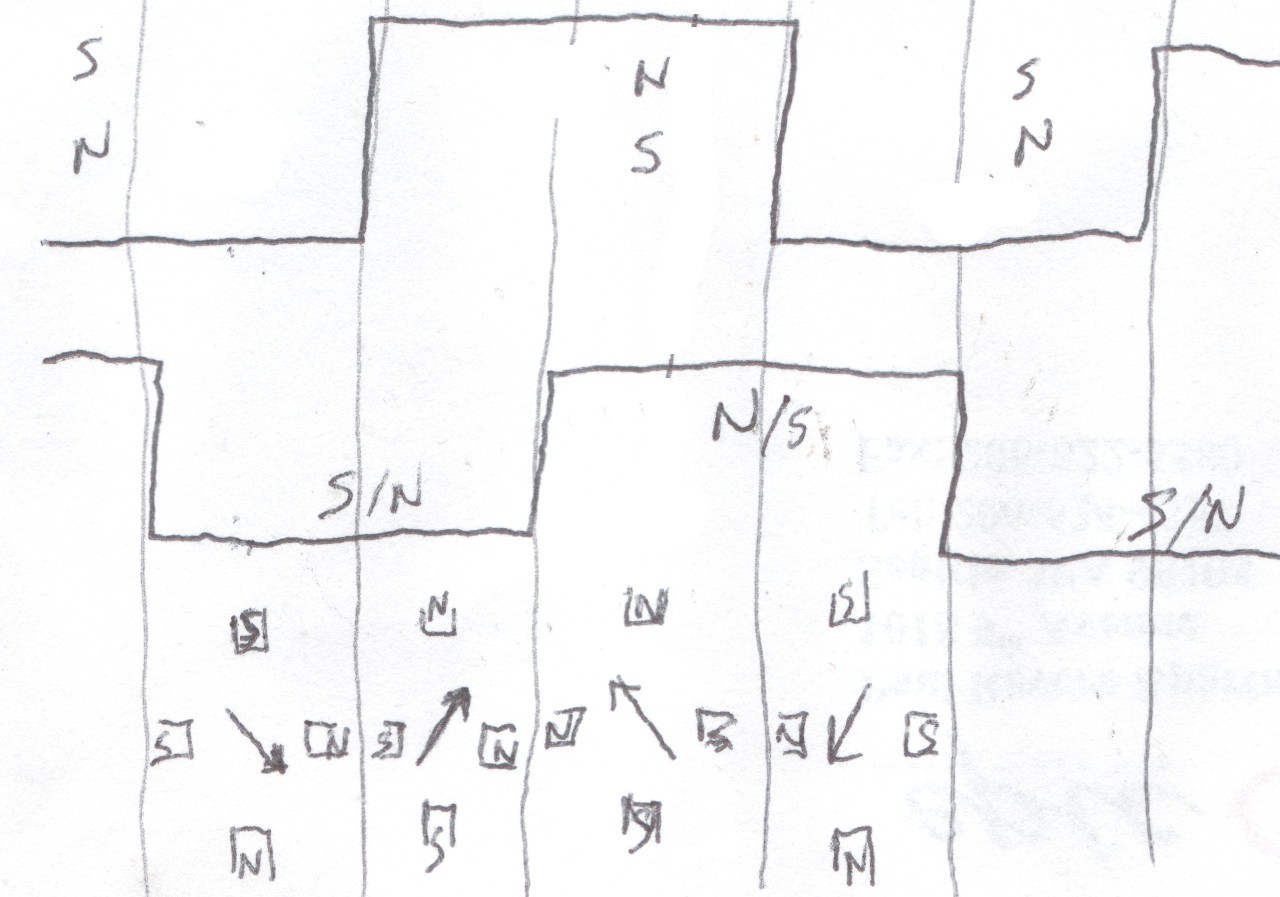
(Where the upper waveform applies to the "vertical" electromagnets, and the lower waveform applies to the "horizontal" electromagnets).
The "shaft" in this case is shown similar to a compass, its fixed-magnet is pointing North.
The waveform shown causes this motor to rotate counter-clockwise. The upper waveform "leads" the lower-waveform, its rising edges occur first. To reverse the direction, change which waveform "leads" and which "lags."
Alrighty, looks pretty good.
Except, look again at that first picture.
Notice something about that "compass"? It consists of, essentially, a bar-magnet.
Now, in this picture, that bar-magnet is *strongly* attracted to the horizontal electromagnets because its surfaces are *really close* to the surface of the electromagnets. Remember magnetism is much weaker in air than in a magnet (or metal)... The less air, the stronger the attraction.
So, revisiting the two cases:
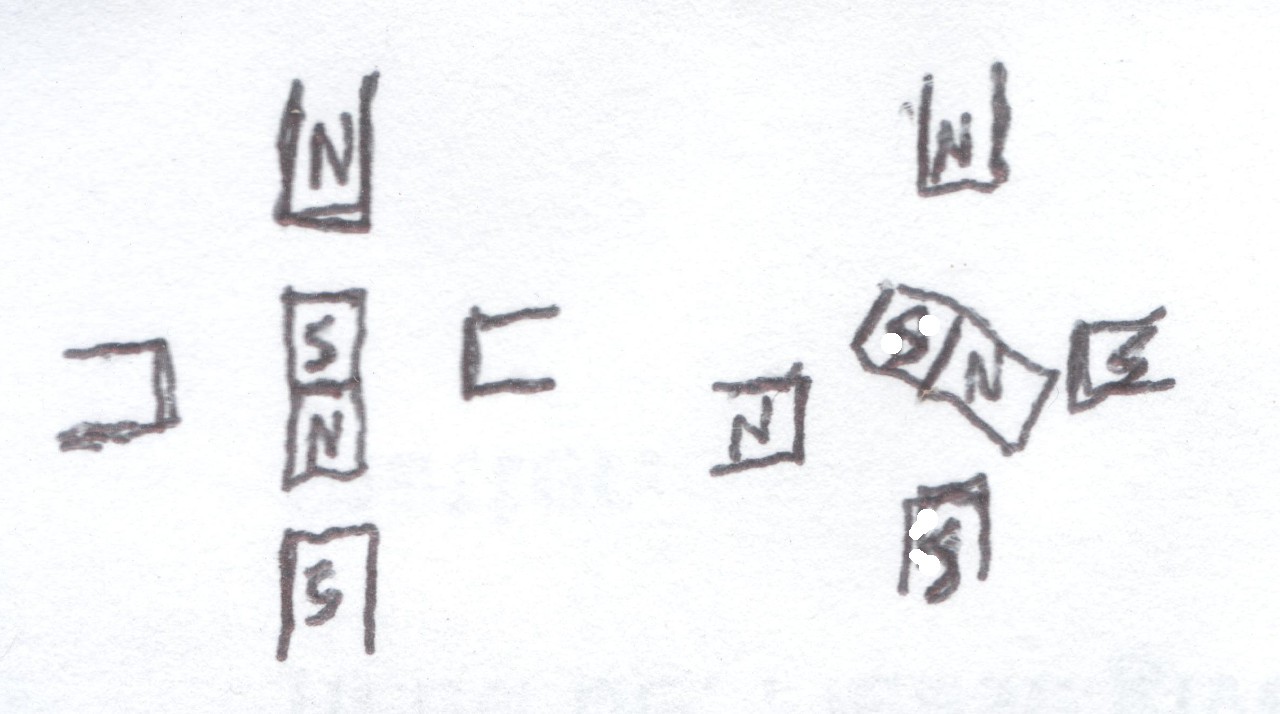
Because of the small air-gap, we have a strong attraction to the rotating-magnet between the single powered-winding/phase on the left, and we have a weaker attraction to the rotating-magnet between either of the * two* powered-phases on the right.
The image on the right, again, is the way "single stepping" of bipolar-motors is often implemented (again, using Quadrature).
Interestingly, as I understand, when both of the winding (pairs) are powered-down, and the shaft is turned by-hand, the stepper-motor will have a tendency to "step" between steps shown on the left. Because, again, when the windings themselves are powered-down, the magnet on the shaft will be most-strongly attracted to the metal in the windings, rather than the air-gaps in-between them.
So, already, when using quadrature, "single-stepping" is, in effect, already suffering many of the difficulties introduced by "micro-stepping."
I dunno the math (and physics) off-hand, but basically if you're applying 2x the power (1x power to each phase) then you're achieving something like only 1.414x the effective strength of a single phase's being powered. AND, if I understand correctly, that's *neglecting* the tremendous effects of the increased air-gap.
There is another way to power the windings, rather than using (digital) quadrature. And, still, this would be considered "single-stepping." In fact, I'd consider this *more* "single-stepping" than the other method, as it actually stops at the steps where the motor would stay if it were unpowered.
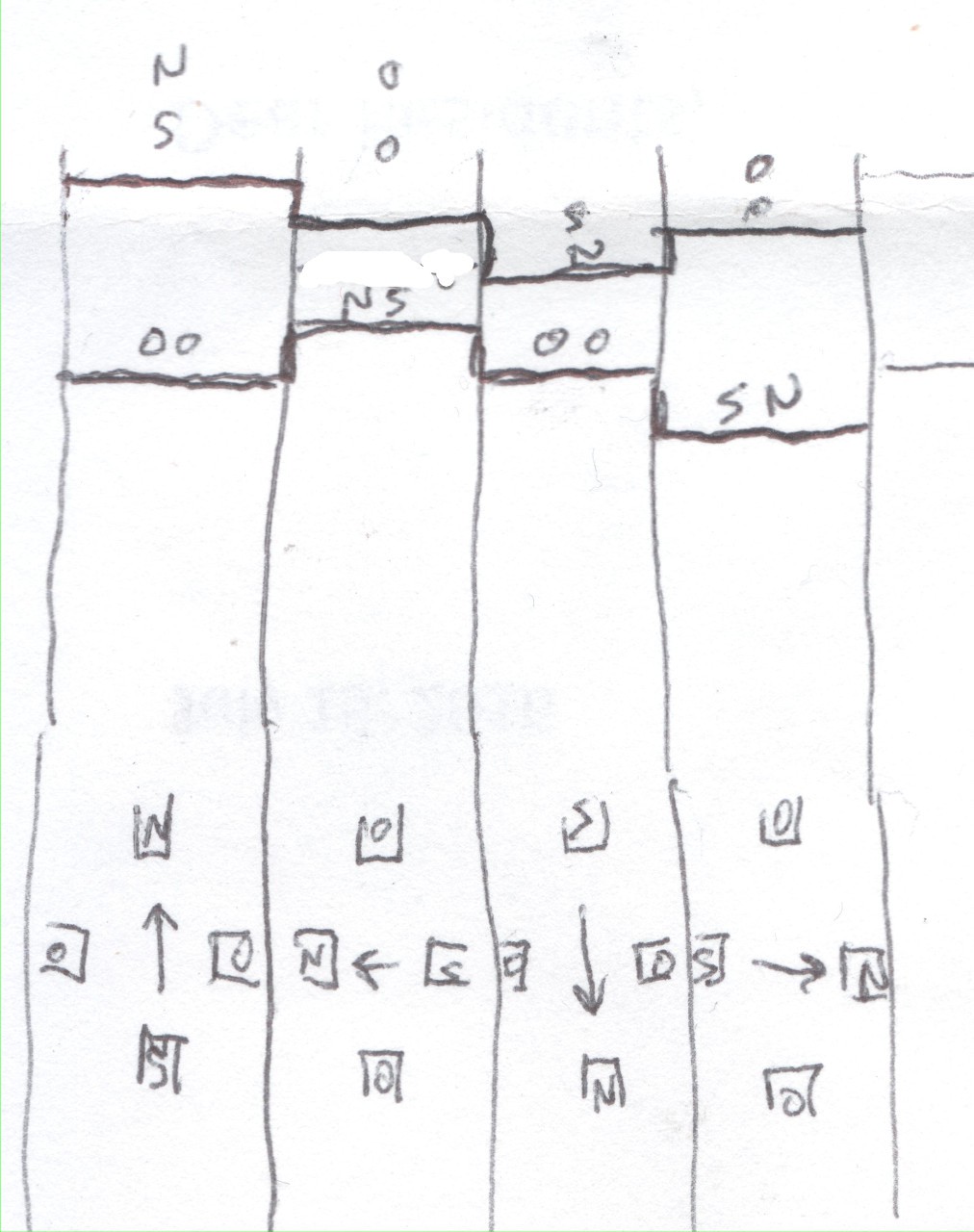
Note, now, the magnets on the shaft are most-strongly attracted to the powered phase, because the air-gap is small. This, however, requires a bit more logic (and circuitry) than the typical "[digital] quadrature" single-stepping; it requires a phase to be either positively-powered, not-powered, or negatively-powered. AND, the "1x power" described above is likely weaker (though much more efficient) than the "1.414x power" described earlier.
So, where do we go from here...? Electromagnets aren't particularly efficient, right? Throwing more voltage at 'em will result in more heat. If the stepper's rated for 5V, and bumping it up to something like 7V (or higher?) to achieve the same strength, we'll get a bit more heat, as well. Too much heat can melt insulation on windings... so it's not ideal.
ON THE OTHER HAND: This method is *much* more like the simplistic "microstepping" technique of driving the two windings with *analog* sine-waves that are 90 degrees out of phase.
However, again, consider the air-gaps.
I can't fully wrap my head around it, at the moment, but if that gap has as much influence on the holding/positioning strength as I'm imagining, I could vaguely perceive that instead of 90-degree out-of-phase sine-waves, we might actually need something more like *tangent* functions, 90 degrees out of phase(?), to achieve the same holding-force at any given position.
Further-still, I can vaguely perceive there may be motor-configurations that differ functionally from the simplified example usually given.
Now, I've been known for having pretty bad search-fu (ever since they got rid of operators and wildcards), but I've never seen any explanation for micro-stepping other than sine-waves...
So, apparently, the intuitional-search--rather than the internet-search--continues.
Now... this kinda boggles my mind, as "Brushless DC Motors," which really aren't that much different from stepper-motors, are allegedly becoming as ubiquitous as they are... I can understand their use in situations where *speed* is a concern, (they probably found their initial-niche in spinning hard-disks or CPU fans) but I'm having a *really* hard time believing they're as-common as being alleged for *positioning* without some extremely sophisticated feedback loops, excessively high voltages, and high-resolution position-encoders. In which case, frankly, there needn't be much understanding of the physics, as much as there'd be a need for high-speed DSP algorithms that could neglect those physics as much as they wish by merely accommodating the unexpecteds rather'n trying to expect them. Which, too, would require power-systems with *much* higher capabilities than the typical ratings of the windings. We're talking... e.g. your 12V DC-motor might be replaced with a "12V" BLDC, but for positioning-purposes might require spikes of 48V or more. This practice isn't uncommon for stepper-motors... single-stepping can be dramatically improved by sending a voltage-surge way higher than the rated voltage, then immediately dropping that down to the "normal" range. Doing this allows for a bit of overcompensation for the windings' inductance, which resists changes in current (and thus resists changes in electromagnetic force). So, by over-powering/volting the winding briefly, the current, and therefore force, can be changed more quickly, which kinda makes sense as far as "microstepping" and changing a motor's micro-step from one to the next. But, then, there're all sorts of "stepper drivers" which seem to be completely oblivious to the actual specifications of the motor, claiming to have 16 or 256 microsteps, which really don't amount to anything more than the amount of overall power applied to the windings, which again, really has no meaning, especially if those [micro] steps are occuring at different rates or from different directions, or are in any way loaded by static/dynamic friction, momentum, or other external forces... nevermind differing motor designs.
Quite frankly, I find it extremely surprising that stepper (or BLDC) motors are able to achieve what they allegedly do... I could understand in a highly-engineered situation wherein it's very well known that the stepper's resolution is *way* higher than necessary (e.g. through gear-reduction) as well as it being known that the stepper's *torque* is *way* higher than necessary at any speed that might be required of it, then it makes sense it would work... (in which case, "microstepping" serves no *positional* benefit, but definitely serves a benefit toward its ability to move from one step to the next smoothly without being *loud* in doing-so, and plausibly aiding in its ability to move without missing a step). But people be throwing steppers at things that allegedly work, with zero consideration of these factors... How? No Friggin' clue.
I do know that we once needed a custom gear overnight that was cut via stepper-motors which we were unaware until the next morning lost steps the entire way through the process... That was a friggin' mess that resulted in countless calls to gear-manufacturers until one just happened to be cool enough to do a custom-run overnight for our needs and an overnight delivery, for free, no less... and if I wasn't so friggin' stupid, and the team wasn't so friggin' frantic, we'd've made a tremendous effort to thank that company and the dude who was so gracious as to take our call, work extra hours, and bring it to the attention of the supervisors to get us that custom gear from halfway across the country in two days. Fsck steppers... That Dude and his supervisor are great blokes. Makes me proud to be Murican.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.