 The Big One
The Big OneSo it has been a little while since my last log. I assure you that I am still alive and kicking. Things have been a bit slow, due to the culmination of many parts of the project, but at this point everything seems to be working, and I have just merged my changes from the development branch to master.
A summary of what we have accomplished in the past week:
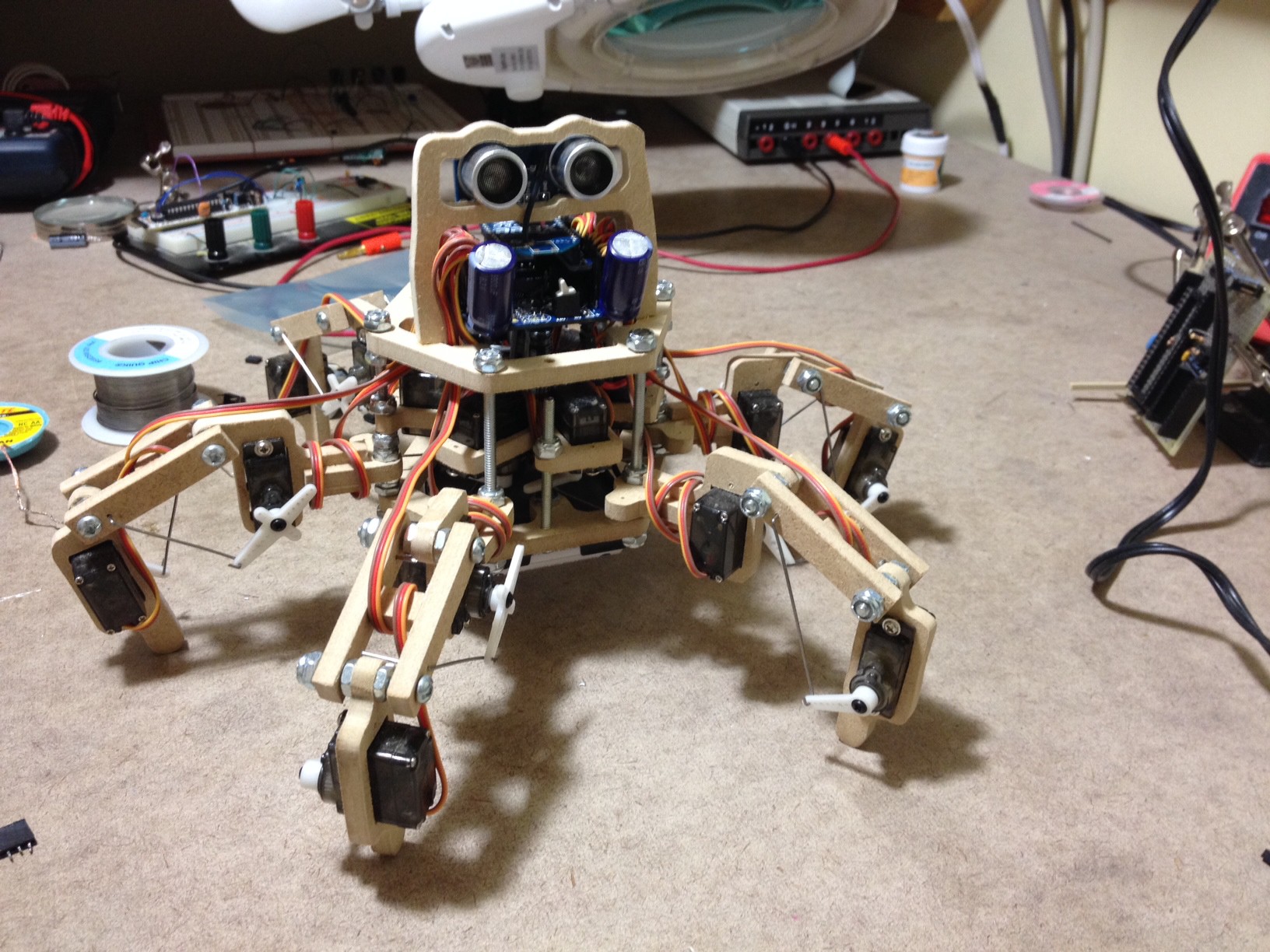
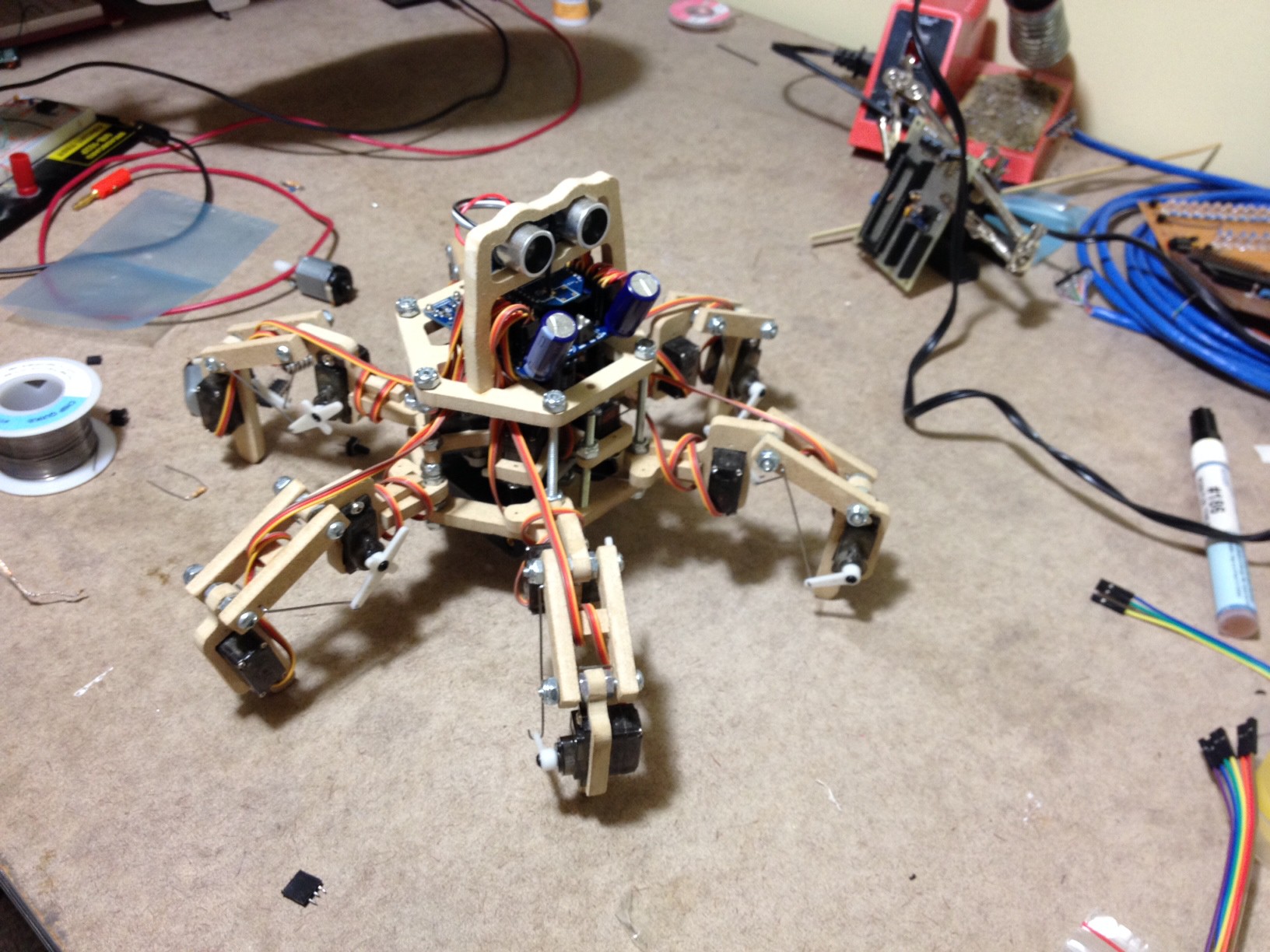
- Re-cut the top layer of the frame to accommodate the rev2 PCB and Adafruit magnetometer (see photos below)
- Mounted the distance sensor to the frame (unfortunately the distance sensor mounting piece pushes us over the arbitrary limit of fitting everything on a 8.5x11" sheet of MDF)
- Moved all of the most commonly customized values (what revision of the board are we using? is there a magnetometer? is there a distance sensor? what is the mounting angle of the magnetometer? is there a customized CPU clock speed?) to a file hardware.mk which is included from the main Makefile. This allows for easy customizations without having to modify a large number of header files; future git updates of the source code can then easily proceed without conflicts.
- Added functionality to Processing API to support reading heading and distance
- Updated the rev2.1 board design to address issues found in the rev2.0 board
Some pictures of the latest Stubby instance... higher quality photos will be forthcoming, but this should suffice for now.
Cheers
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.