 The Big One
The Big OneI replaced the Chicago bolts today with normal 1/4" bolts + nuts. I found the Chicago bolts were coming undone quite easily, and since you could not tighten each section (frame / leg / frame) independently, the entire leg assembly felt a bit sloppy. It is quite a bit better now.
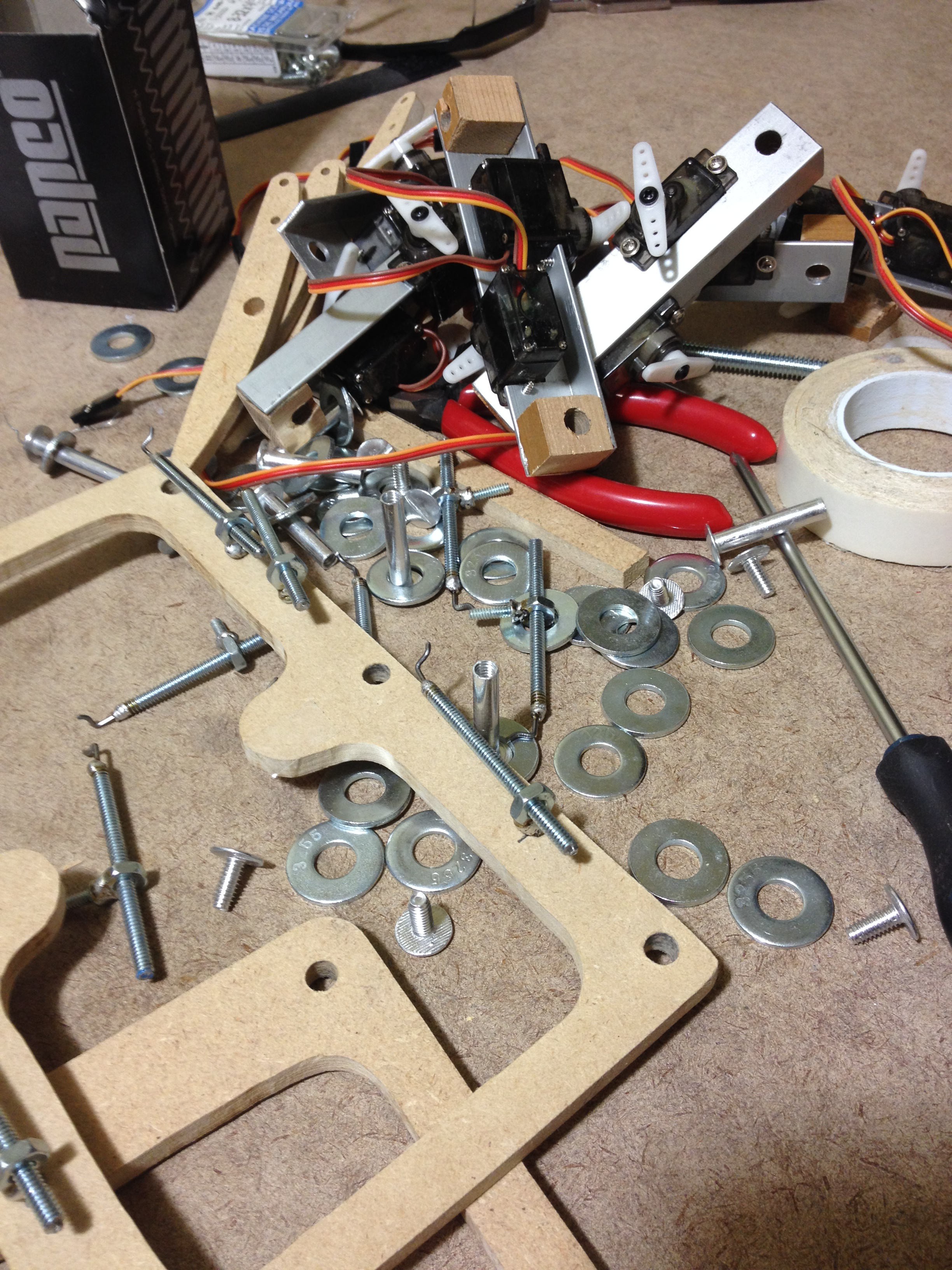
Everything taken apart:
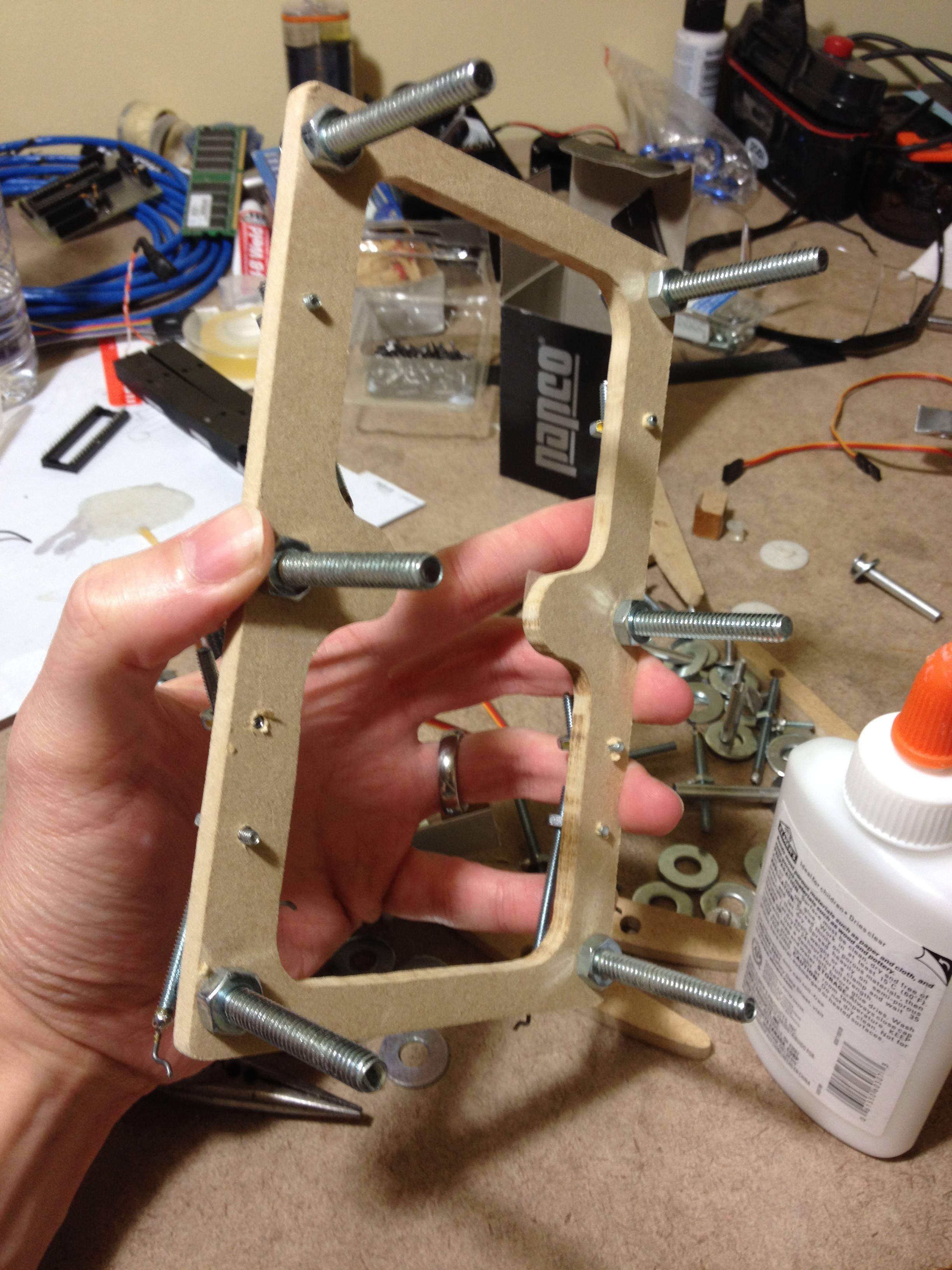
Starting to re-assemble, using nuts and bolts:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.