 The Big One
The Big OneI am trying out a new leg design... this one should reduce the weight, decrease the material cost, allow for walking on more surfaces such as carpet, and allow for a more interesting look as well. I used 1/8" hardboard for this (instead of the 1/4" MDF I was using before), and cut the design out with a scroll saw borrowed from Exot.
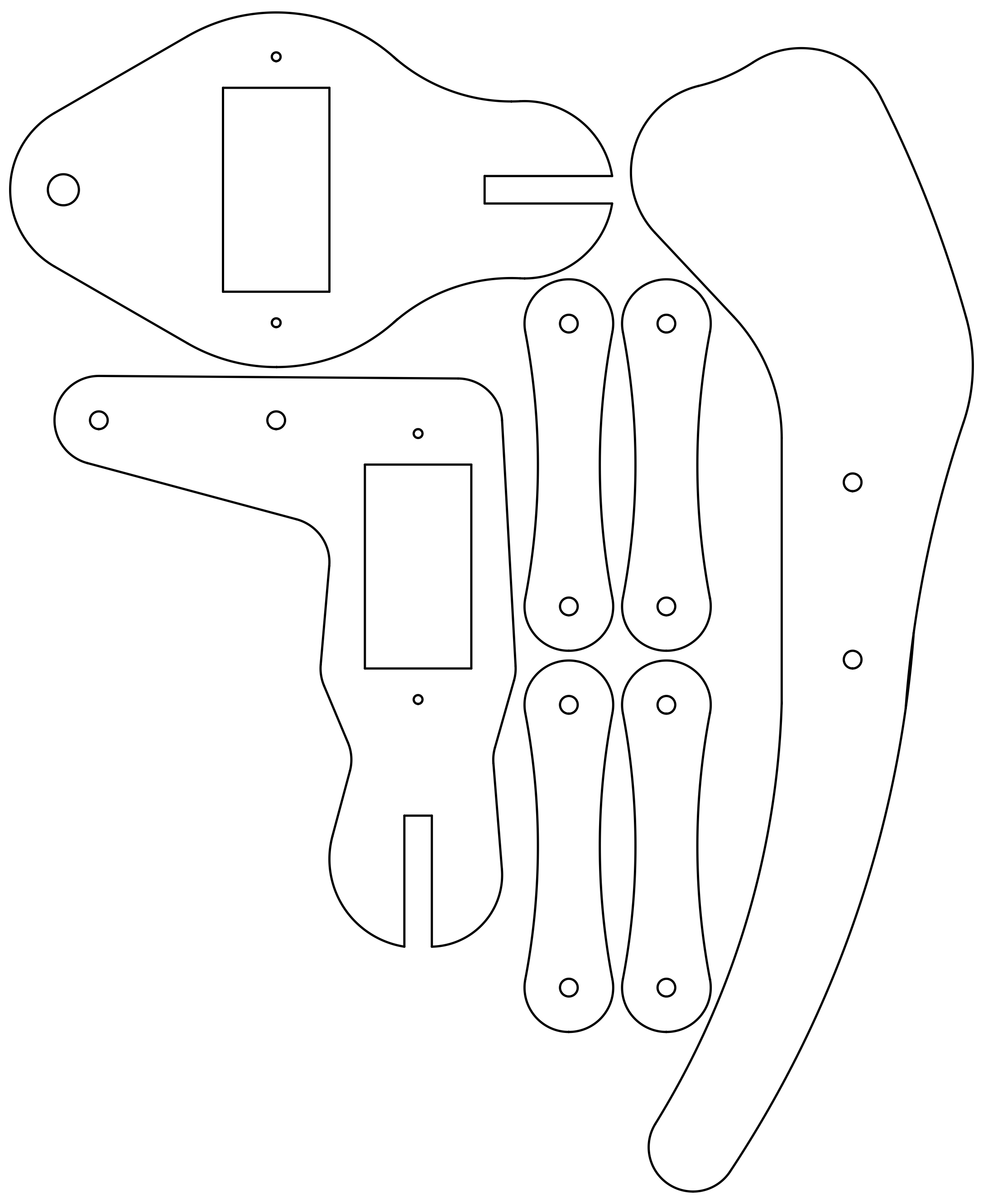
The design:
The assembled prototype leg:
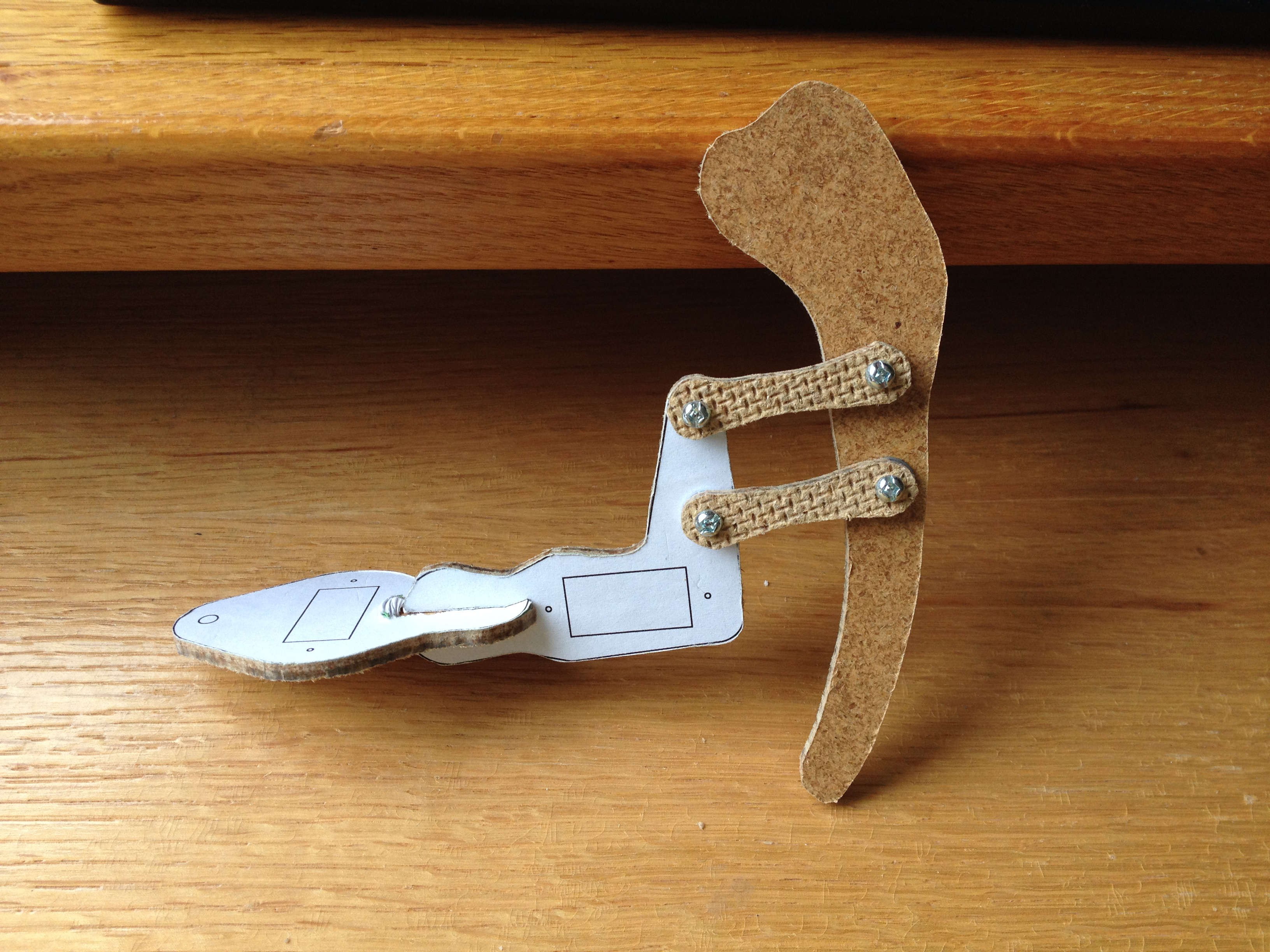
The dual hinged design allows the leg to move straight up and down, rather than lifting up to the side. This will prevent the leg from getting caught in the carpet when raising the tibia.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.