 The Big One
The Big OneStanisław K is also working on his own version of Stubby. He has plans to eventually scale up the size to support larger servos, but initially he has converted all measurements to metric (my version has the CAD drawings in metric, but it uses imperial for drill sizes due to USA / Canadian screw sizes, #6, #4, etc).
Prior to actually making it, he has modelled the entire system in SolidWorks 2013. An example of this modelling is below:
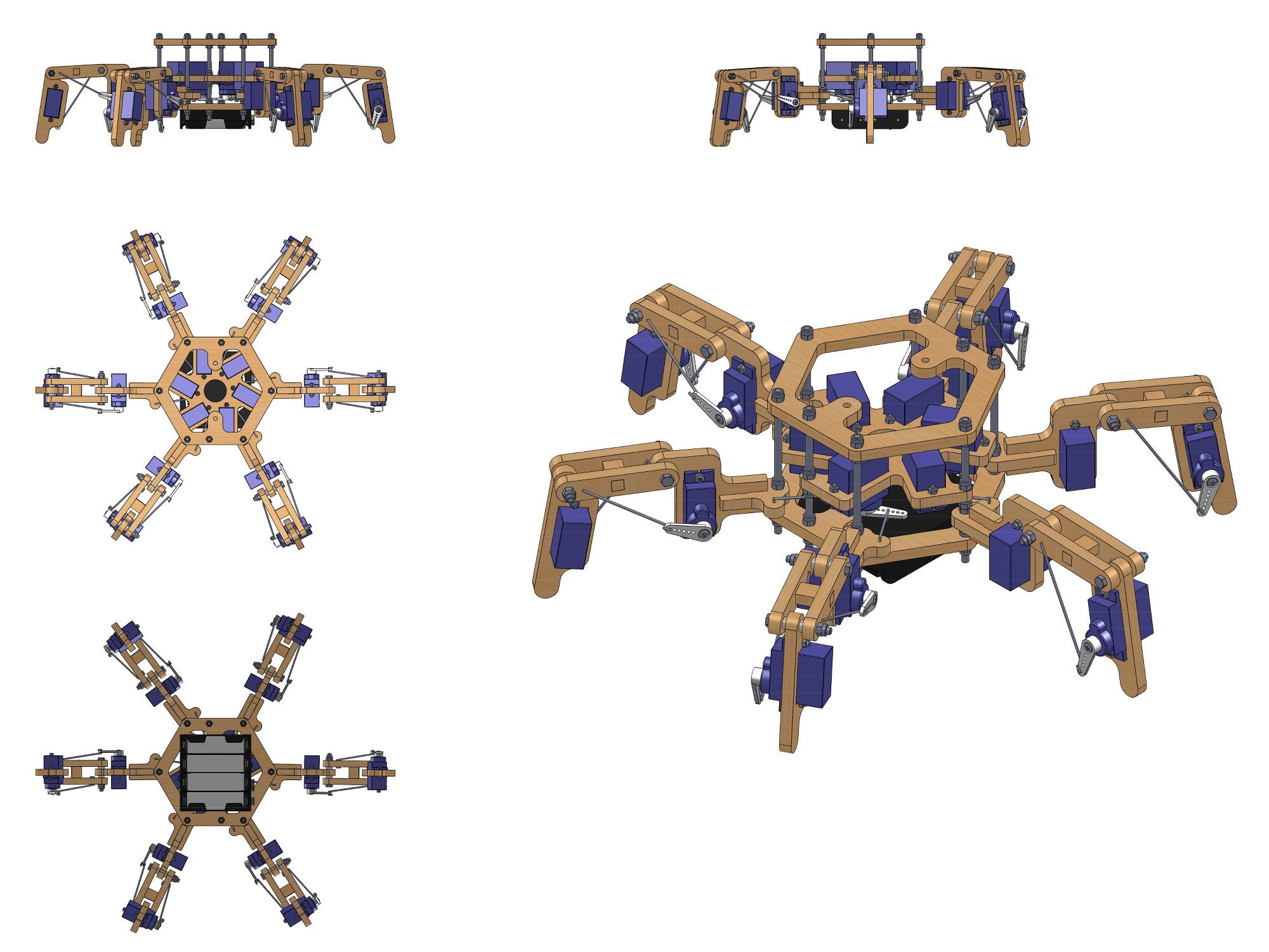
Some other (very high resolution) plans he has created include: 3D body view, body component listing, exploded body view, and leg assembly (part 1 and part 2).
In case anyone else has the source SolidWorks files, he has graciously sent me everything that he has. You can download this for yourself and play as you see fit (warning: this is a 130MB archive file, and may take some time to download).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.