 Nathan Peterson
Nathan PetersonCurrent status of this project is that the juggling robot is able to juggle 7 balls! I'm pretty sure that is a world record for juggling robots. It can also do some different juggling patterns (i.e. siteswaps), which is also something that has never been done. I plan to fix some issues and make the siteswap patterns more stable, but ultimately my next project will be to create a toss juggling version.
0%
0%
Juggling Robot
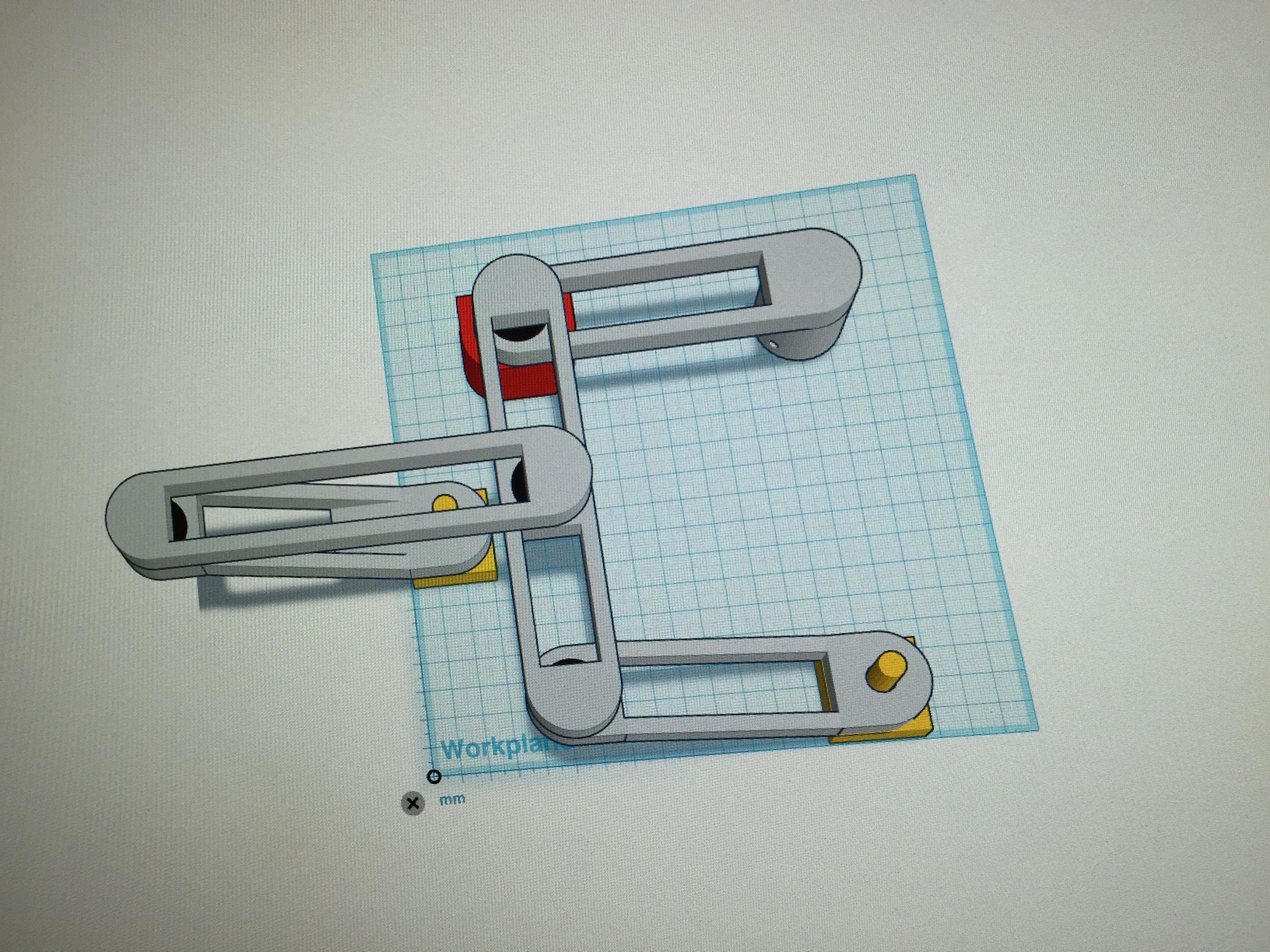
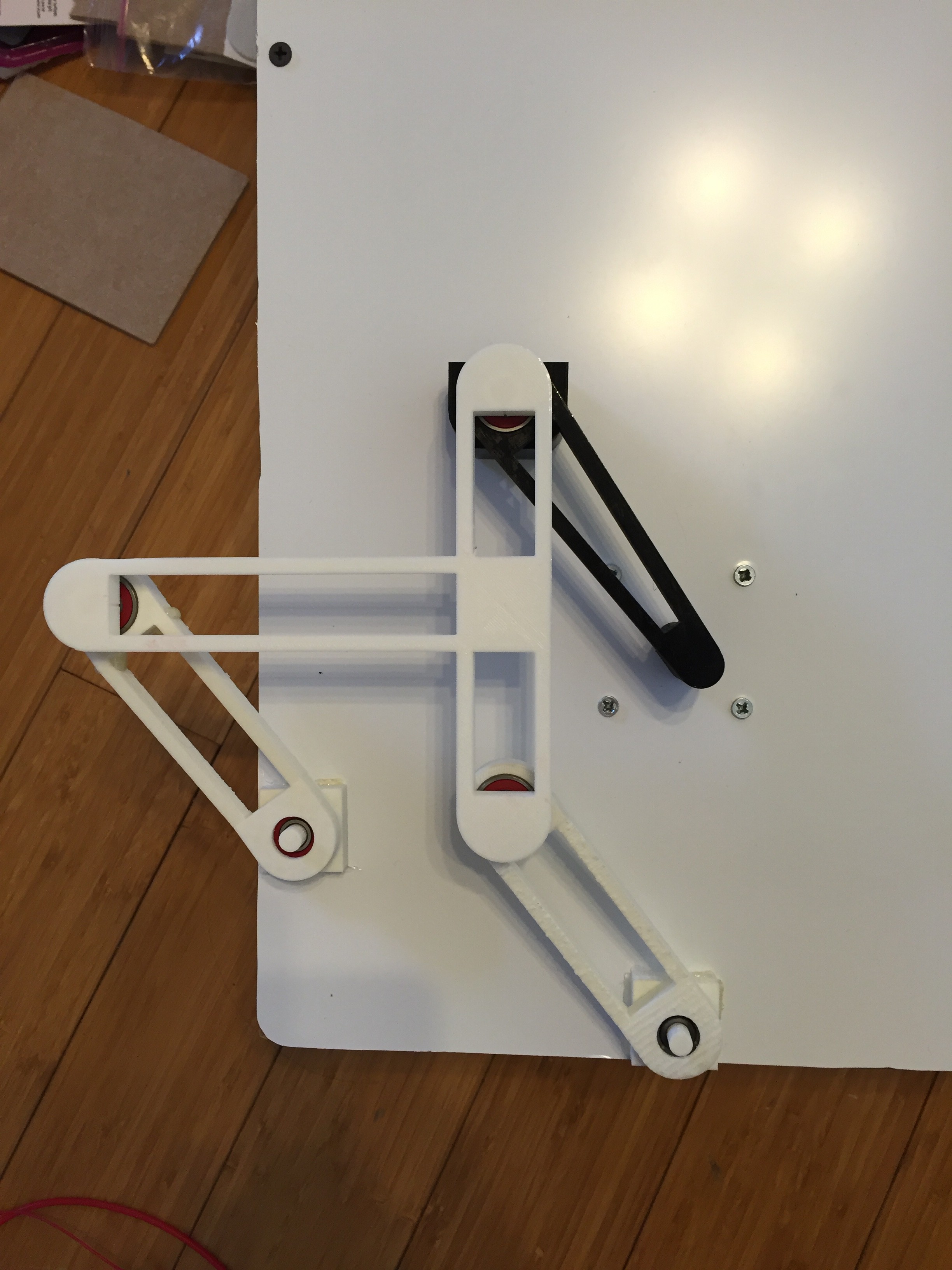
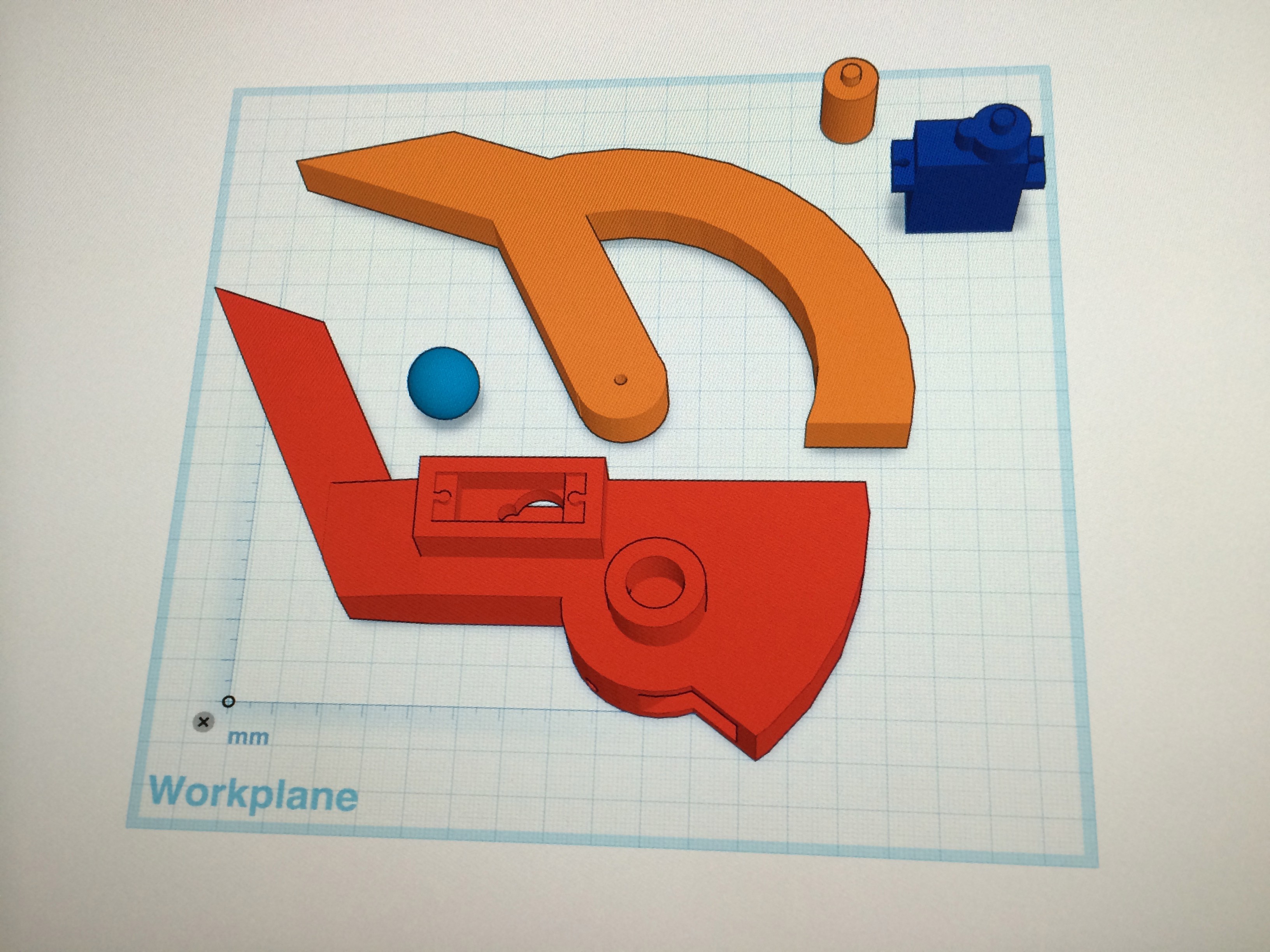
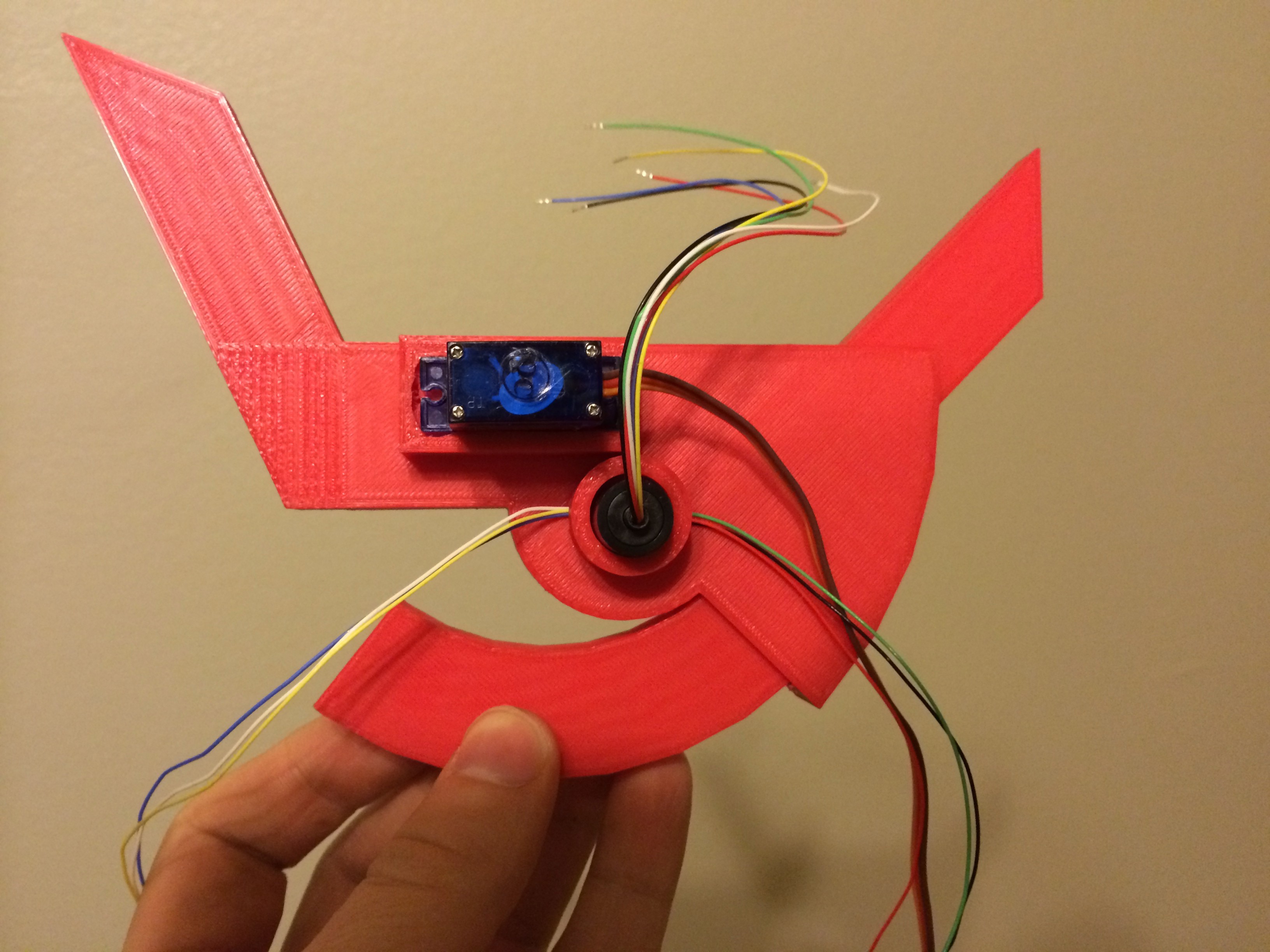
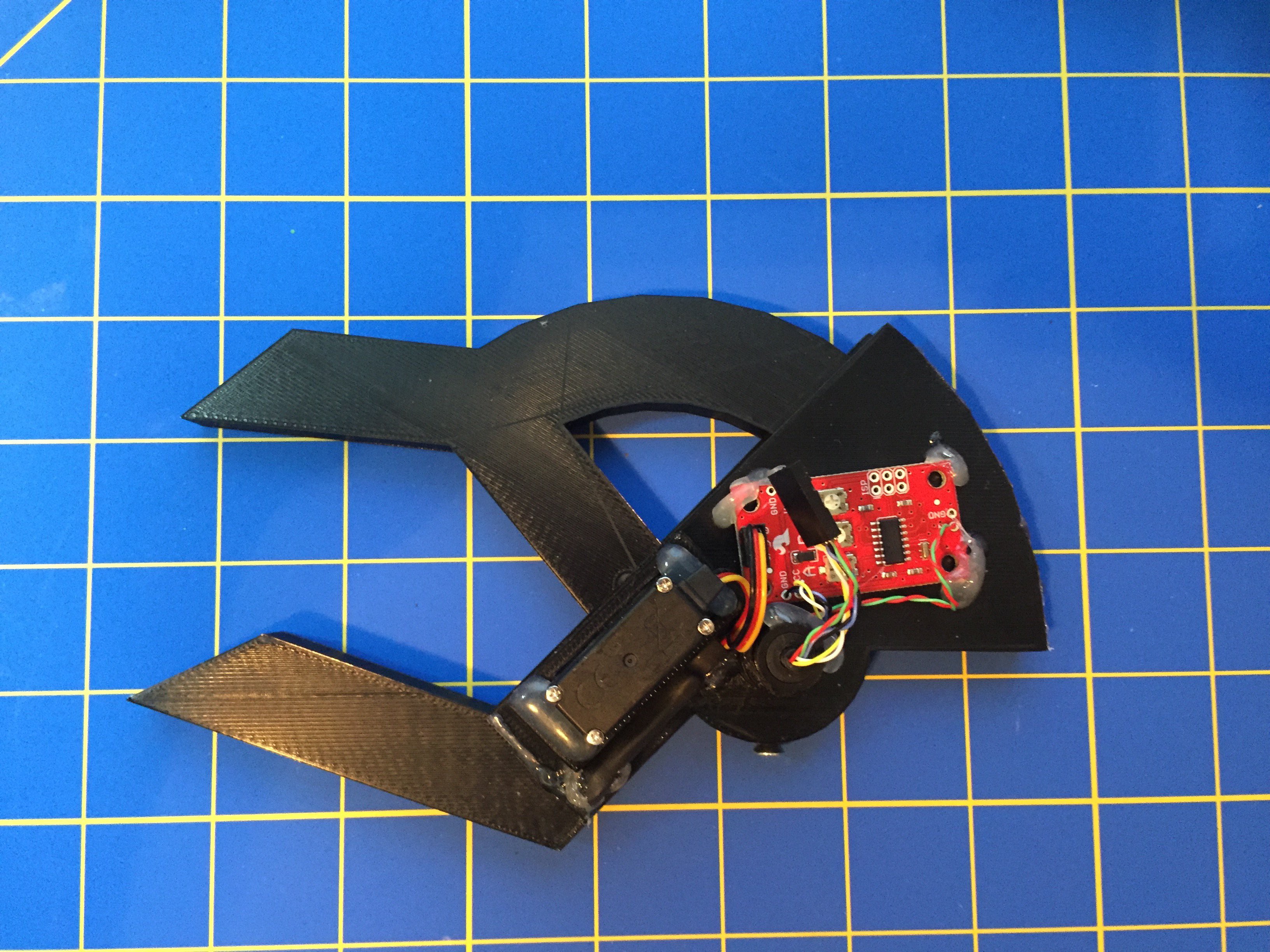
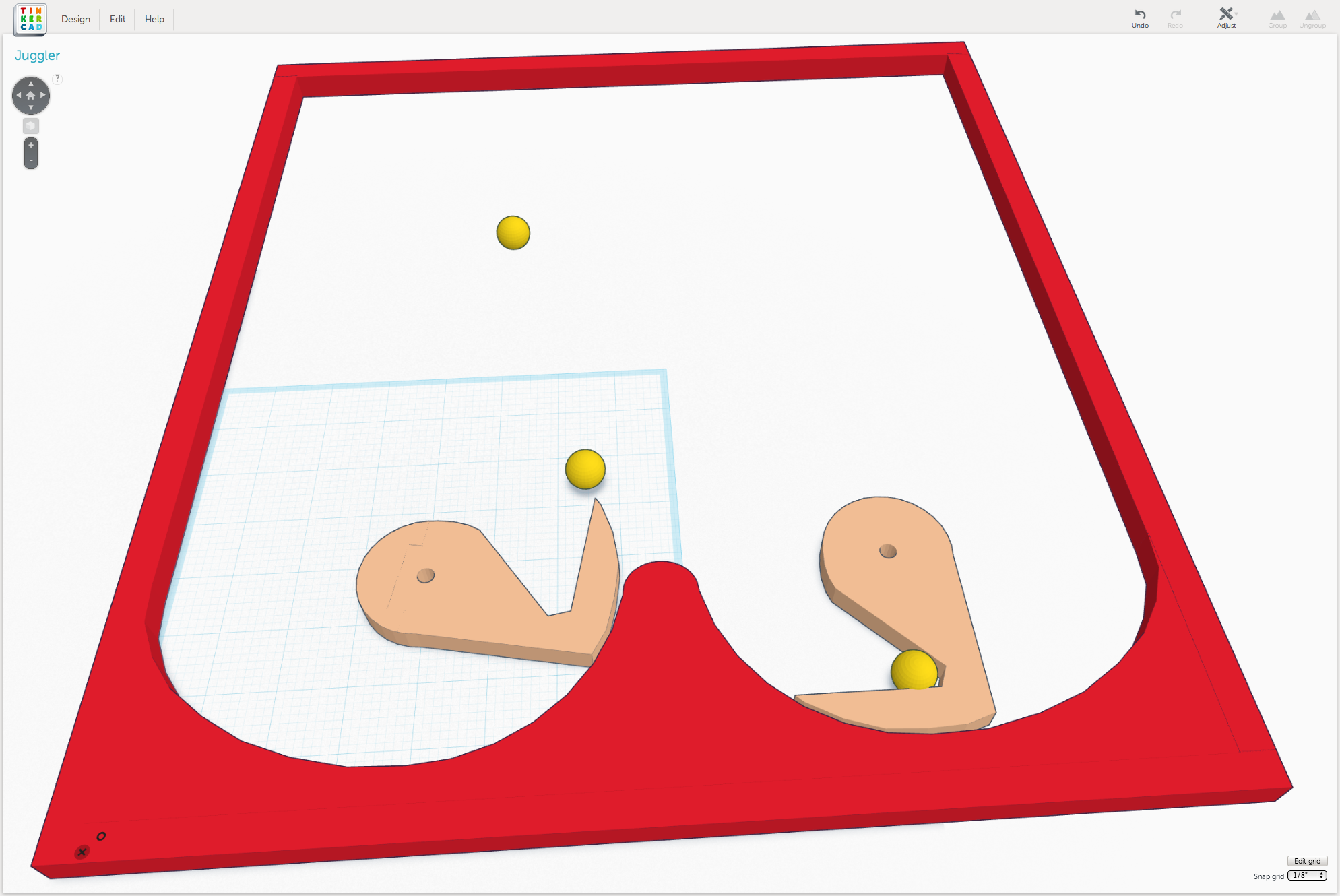
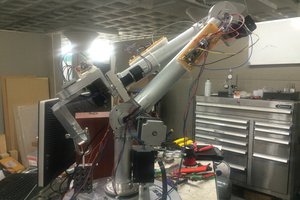
This robot can juggle 7 balls and various juggling patterns by rolling balls on an inclined surface.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests













 Colin Kingsbury
Colin Kingsbury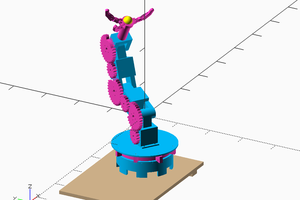
 Les Hall
Les Hall
 Sarah Petkus
Sarah Petkus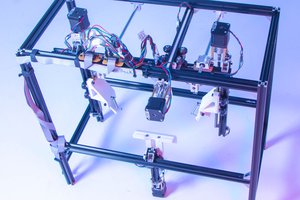
Nice, mesmerizing. I built a Claude Shannon juggling machine. I know what you mean, took a year and I gave up several times but just had to stick it out - was so gratifying when it worked. Mine is a real hatchet job and can only currently run 40 seconds until dropping a ball. But my motor surges and the whole machine rocks a bit - so can be fixed.
Have you done any work on toss juggling machine?