 Nathan Peterson
Nathan PetersonI was having some inconsistent throw issues with the first design. I'm not sure exactly what the problem was, and I don't have it setup anymore to test out, but in any case, I decided to go with a scooping method instead where I don't have to worry about catching bad throw. I just throw them in the general direction of the sidewall where they fall down into a pit and get scooped out and then thrown again.
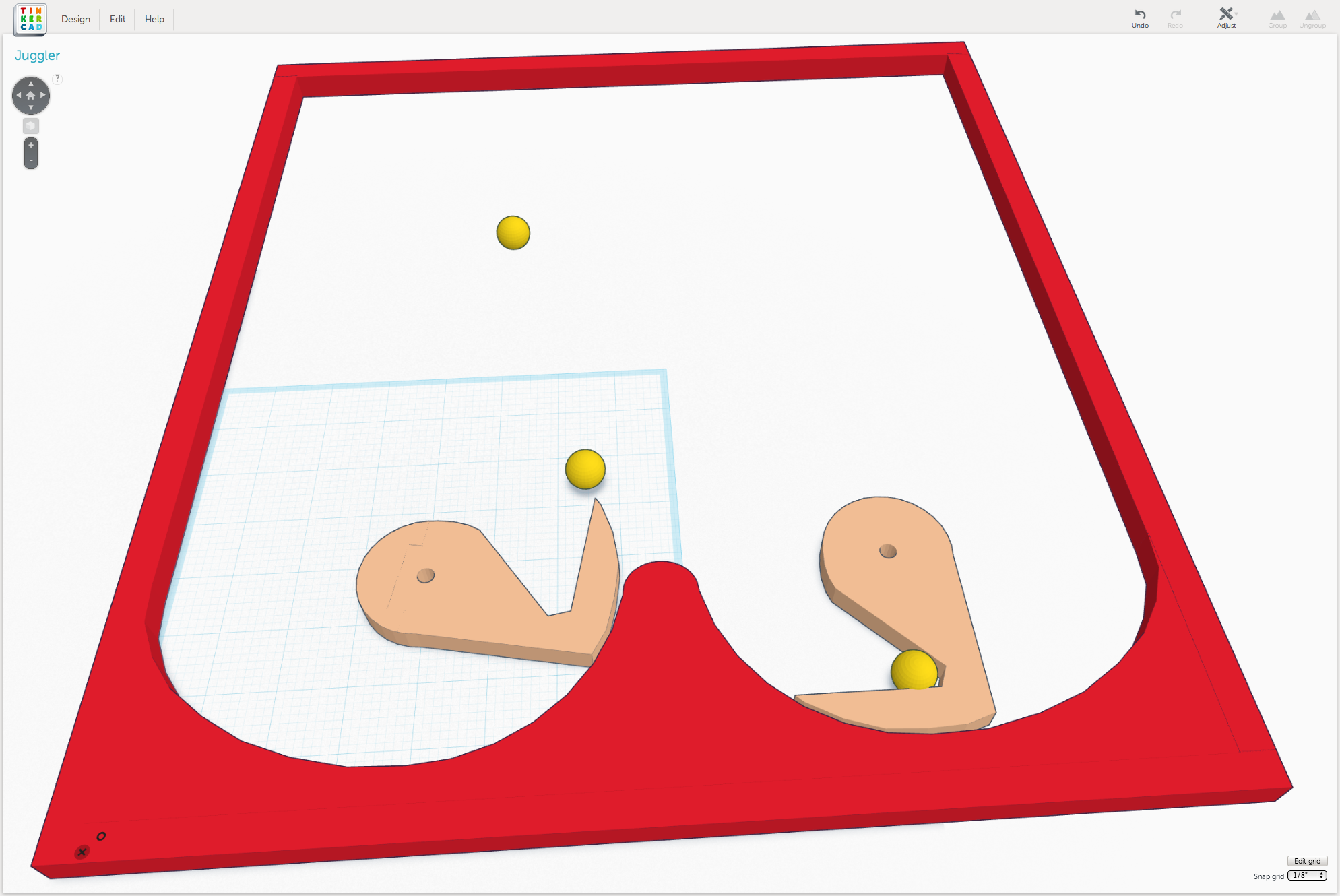
Here is the finished design. I laser cut the border, and once again 3d printed the hands.

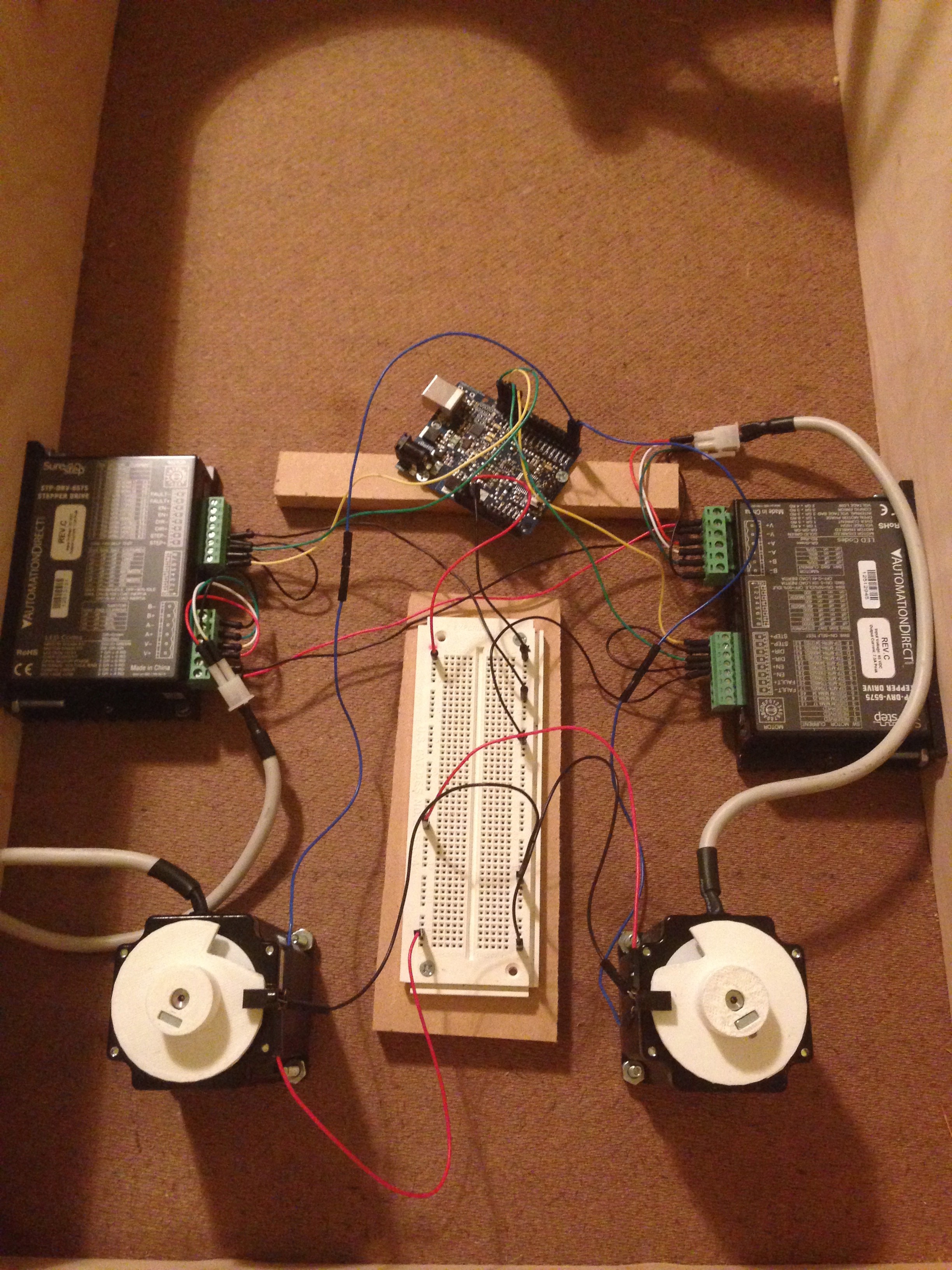
Here's what it looks like in the back:
Here is the video of it attempting to juggle 3 balls:
As you can see, that did not work so well. I couldn't figure out how to scoop them without knocking them around at the same time. I couldn't get them to settle fast enough to be able to juggle.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.