 Nathan Peterson
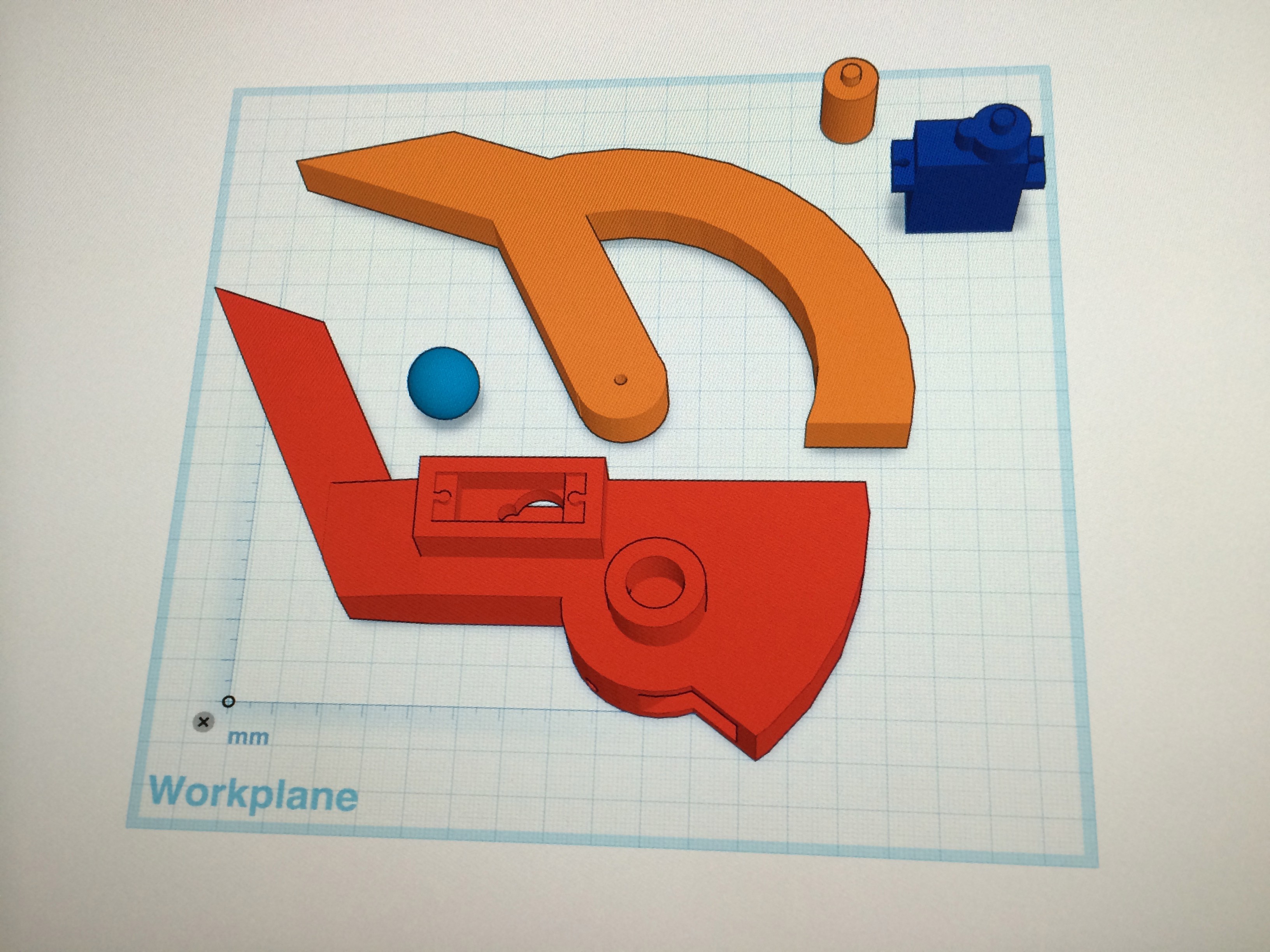
Nathan PetersonThis 4th design is a bit more complicated. I decided I wanted to fix the catching problem by actually having the hand open and close. This means that in addition to the stepper motors, I have a servo mounted directly on the hand so that I can control the opening and closing. Also, since the hand is rotating, I needed to use a slip ring so that I could run wires to the rotating servo without the wires getting twisted as the hand rotates.
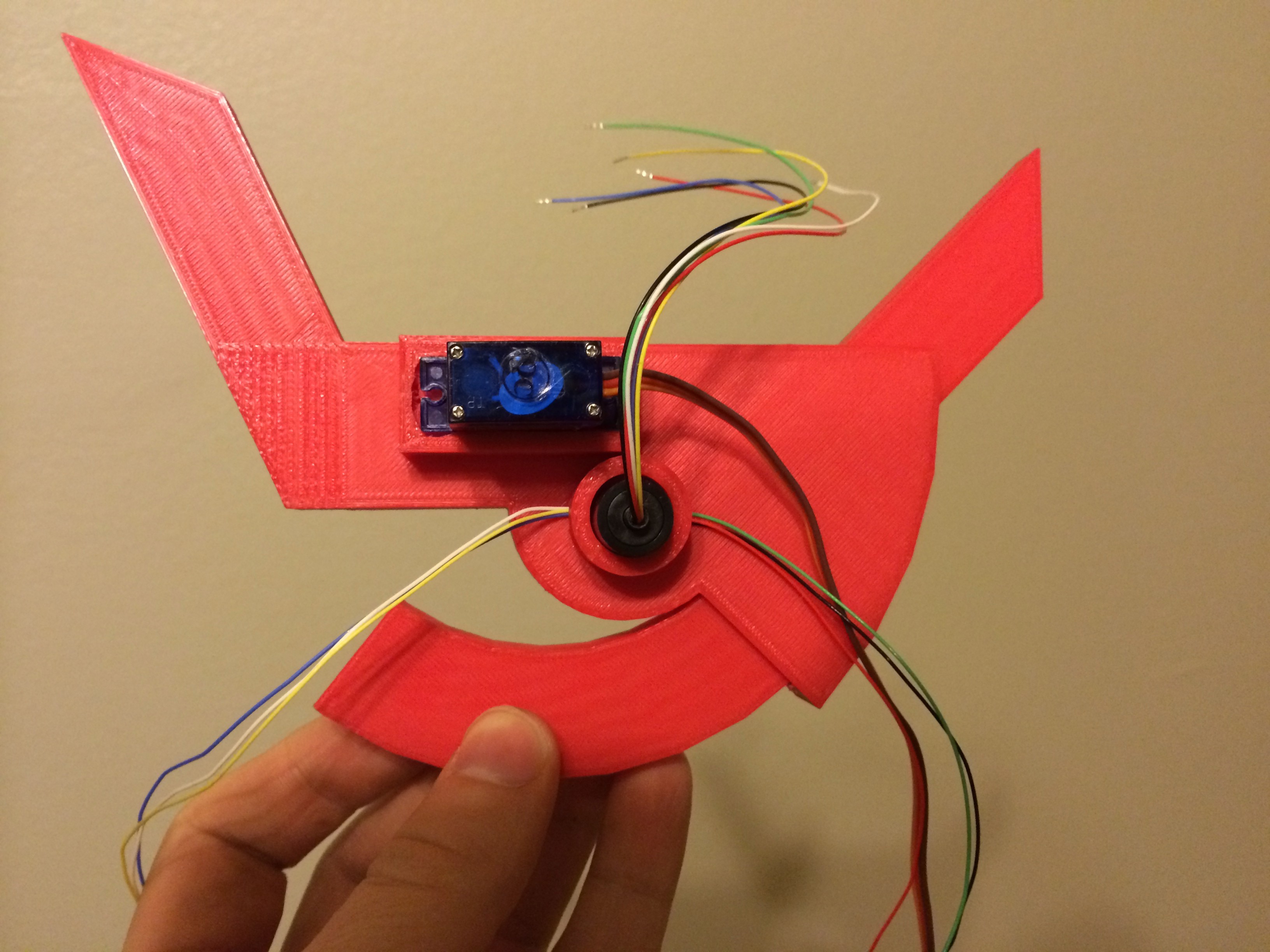
Here is the result:
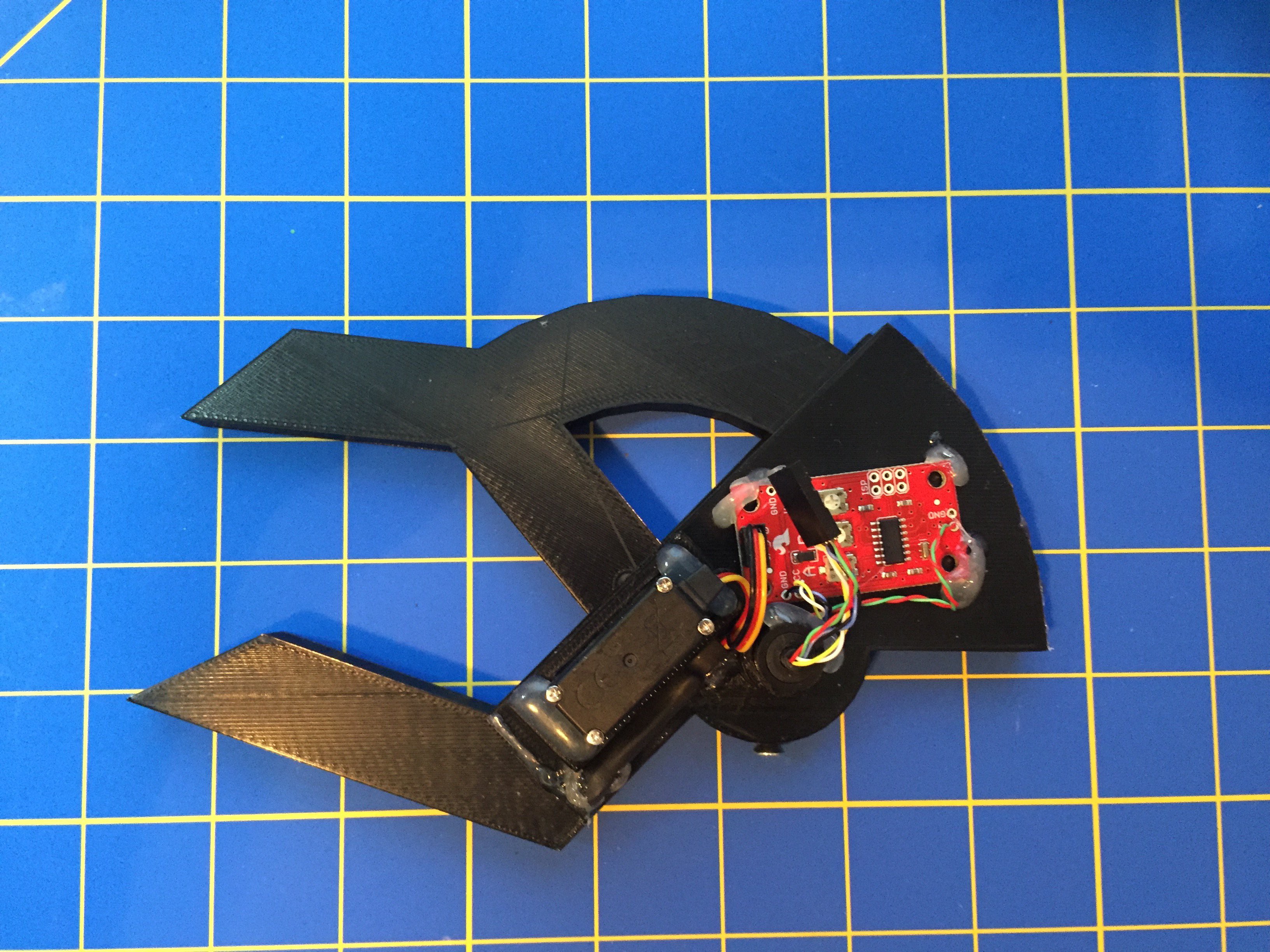
Here is a later version that I made with a sparkfun servo trigger directly mounted on the hand:
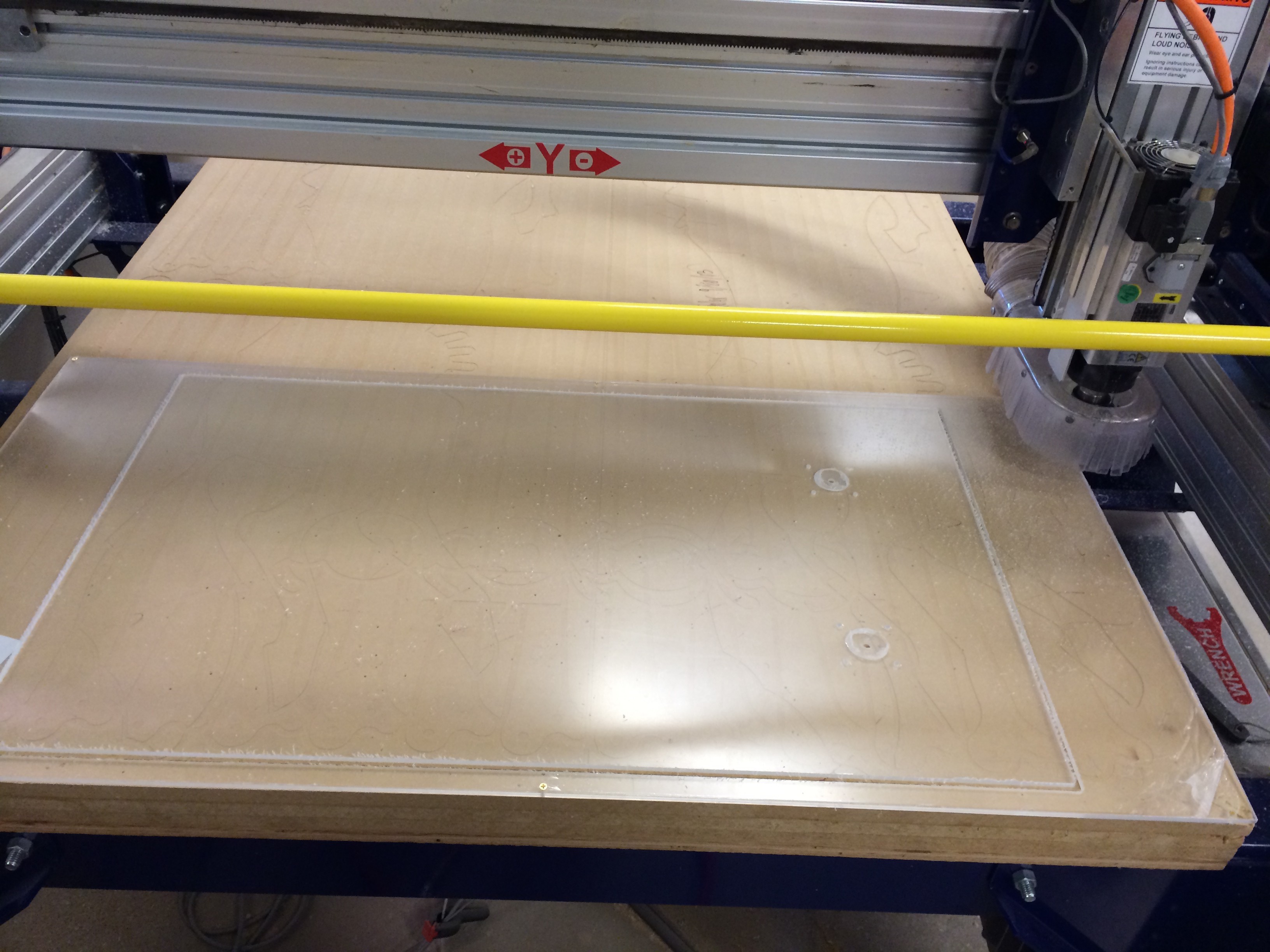
Also, I decided to update the ramp so that it is larger and I decided to use acrylic for the surface this time. Here is the CnC machine creating the motor mounts:
Motor mount up close:

Here's the video:
It looks like it is working well in the video, but in reality it does not have consistent throws. At least not good enough to juggle more than one ball. Even with one ball it will mess up after a few throws. After analyzing it for a while, it looks like the issue is that it is relying too much on the hobby servo to open the hand at the right time and speed. The servo is not accurate enough for that, and even when I bought more expensive servos, it didn't solve the problem. I don't see a way around this problem without doing some other design that does not involve the ball being thrown while resting against a moving part that is controlled by a servo.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.