0%
0%
Lisa/S Autopilot
Ultra small Fully autonomy capable UAV autopilot
 Piotr Esden-Tempski
Piotr Esden-TempskiBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 Alan
Alan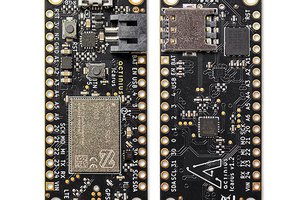

 Hamid el moudn
Hamid el moudn
 David Wilson
David Wilson
The drawing of this board is very good, but I can not find the hardware file, may I ask where is the hardware file, and what software is used to draw the pcb