 Ben Nortier
Ben NortierI've made some progress in writing code for converting from the Autodesk Fusion design to Mujoco for physics simulation.
Here's the Fusion design:
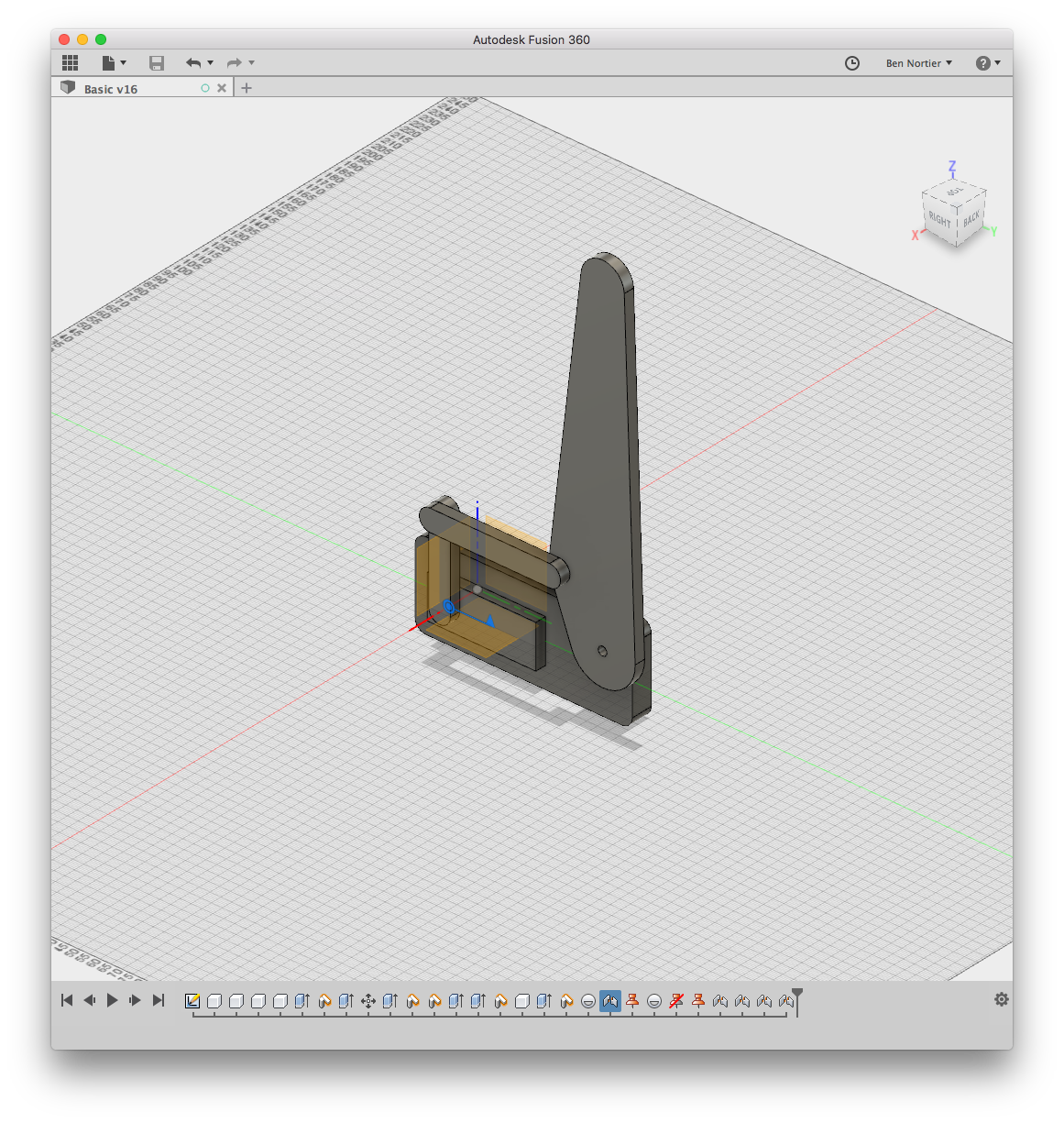
and the Mujoco simulation:
The Fusion design has to follow some restrictions and naming convention for conversion, but I'm confident I can proceed to a more complex leg design, then a simulation of all 4 legs using OpenAI reinforcement learning.
This implies that I will be able to modify the design in a high-level tool like Fusion and automatically do the reinforcement learning for walking. Because Fusion is parametric, it also implies I can write code to vary the design within certain parameter ranges (e.g. leg upper and lower leg lengths), and optimise the design using the simulation output.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.