 griffinpuc
griffinpucWe aim to have our hexapod be able to complete the following tasks:
- Walk on all 6 legs in an efficient way in any direction
- Navigate autonomously using an ultrasonic proximity sensor
- Successfully travel to a location specified with input
A hexapod robot that can navigate autonomously
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
We aim to have our hexapod be able to complete the following tasks:
- Walk on all 6 legs in an efficient way in any direction
- Navigate autonomously using an ultrasonic proximity sensor
- Successfully travel to a location specified with input
With two servos, we developed the first version of the code for our leg movement. This is a very basic first step, that focussed on the way we want to move our hexapod's legs.


 Raspibotics
Raspibotics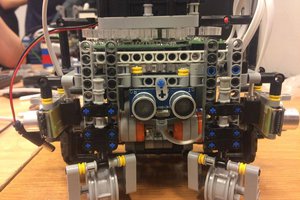
 maks.przybylski
maks.przybylski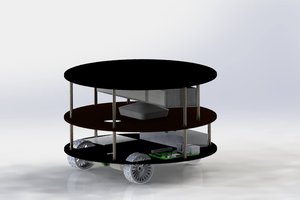
 lbinder
lbinder