 deʃhipu
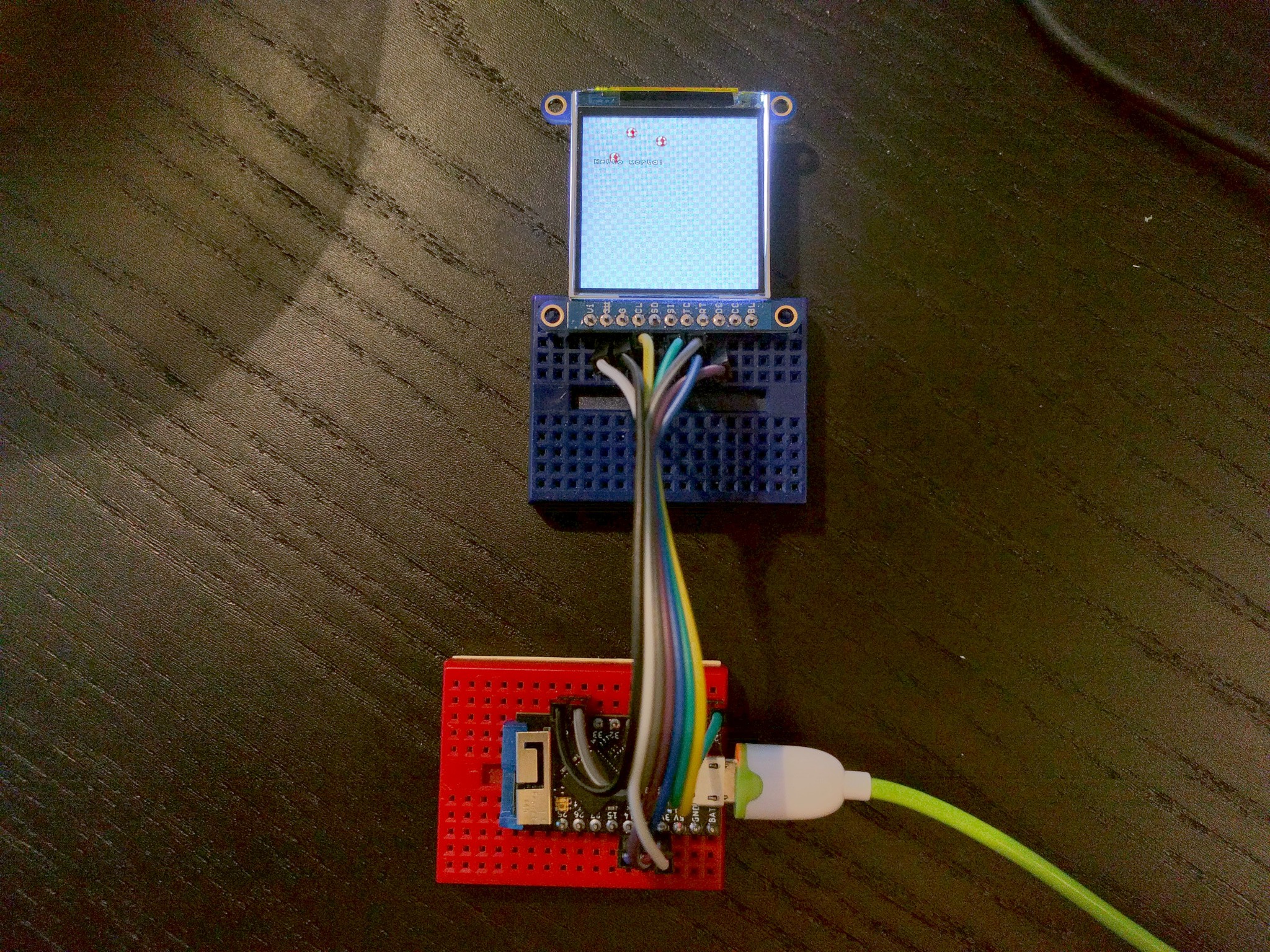
deʃhipuThis is a MicroPython library that provides the means for drawing sprites with tiled background on 16-bit SPI-based displays. It consists of a small part written in C that needs to be compiled into the firmware, and the rest written in Python, usually also included in the firmware as frozen modules.
This library was originally created in CircuitPython for #µGame, but has since been ported onto other platforms.










 Ken Yap
Ken Yap
 Hugh Darrow
Hugh Darrow
 Albert Gonzalez
Albert Gonzalez
An 3D printer enclosure makes the projects friendly to none-hardware engineers...