 davedarko
davedarko#Tote HaD by @Radomir Dopieralski
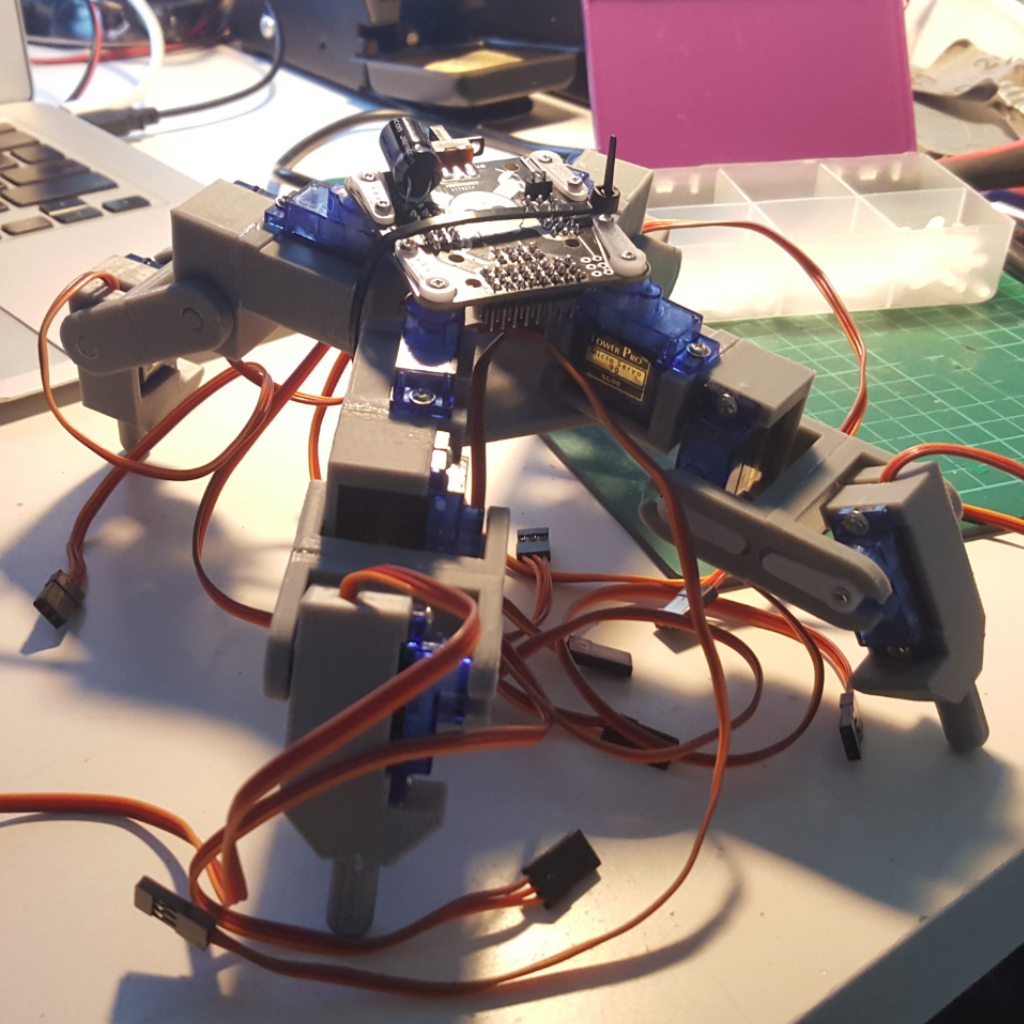
So I've ordered the boards and servos and already soldered a bit, although my free time is rare these months, but I wanted to bring my Tote with me to #Hackaday | Belgrade and code for it a bit. The simplicity of the #Tote is something I really liked and I never had a walking robot before, so this was a thing about to happen. Having a 3D printer at home and loving designing 3D parts I wanted some sturdier looking legs and took some basic servo mounts I designed earlier for #Johnny IV
As soon as the parts are all printed, I will update this post.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
http://dpeckett.com/beat-detection-on-the-arduino - for making tote dance (someday)
Are you sure? yes | no
And of course I have a bad motor and it's mounted as a hip ... servo is stuck in one position, amp ramps up, the Arduino browns out interestingly, although powered by an external power supply. I don't have a spare one, since they are built into #Johnny IV There might be one left from #R8-D8 - a distant relative of R2-D2 - a metal one though. Next one ( :D ) will be with metal servos ...
Are you sure? yes | no
Ah, nothing worse! I hope you do have a spare, can't wait to see how your spin on Radomir's great little quad takes shape.
Are you sure? yes | no
Thanks Craig! I just opened the servo and saw the contacts of the PCB shorting the motor's poles on its case. Thinking about it, it actually makes sense, since this is the common way to make a motor brake... so I guess I can take it back in. 1/12 is still a decent quote for cheap servos, I guess.
Are you sure? yes | no
1/12 is a tremendous ratio with cheap servos mate :-)
I'm glad you have found the problem with it. I would have just thrown it in the bin ha ha!
Now, get it walking :-)
Are you sure? yes | no
I'm done for today, it's bedtime :D that servo was marked X for trash, I was just curious and opened it to see what's broken, no hopes of fixing it.. I was checking the gears for 20min and was about to rip out the electronics, when I saw the short. Now I can sleep, having that sorted out :)
Are you sure? yes | no
This is great. The cantilevered legs are the main problem of Tote, actually, so it's nice to see you addressing this.
Are you sure? yes | no
Those holes looked promising for connecting the bottom part with the pcb, but sadly once the motors were in, I noticed that wouldn't fit :( so there's a huge zip tie going around it. I'm also out of small screws :D but otherwise it looks fine. I still have to manage the cables and the missing wire.
Are you sure? yes | no
Yeah, the holes were more for attaching stuff on top. It looks really professional. Cable management is another thing I struggle with, though recently I found those plastic spirals that should help a bit. I suppose I should hurry up with the software, so that you can make it walk already.
Are you sure? yes | no
Thanks! So far I had one problem to dremel away, but otherwise I'm happy. Do your servo connectors bend as well? I noticed that mine look a bit pushed together. There are some plastic strips for binding books that are interesting for cable managing as well, I might get some tomorrow.
No hurries with the software, as long as it's downloadable on friday or saturday!
Are you sure? yes | no
If by "bending" you mean that they are a little too thick and thus don't get in there straight, but instead form a sort of a fan, then yes. They are thicker than 2.54mm, and you can't really have more than 6 of them in a row. I should actually split them into groups of 3, but then it would be too much work to solder.
Are you sure? yes | no
exactly! I have some thoughts on the board, have to write them down soon. Are you planning a REV2 or will it be another robot then?
Are you sure? yes | no
The boards I have assembled for the tutorial are already REV 3 :)
Compared to yours, they don't use pads for the Pro Mini, but holes (like the originial Tote did, makes it easier to solder the module on), have the servo headers moved a little bit farther from the Pro Mini (because the Pro Minis sometimes are wider than the spec), and have different placement for the battery and capacitor connectors.
Of course all comments and improvements are very welcome. I plan to merge the two robots back into a single Tote robot afterwards, and keep on improving that one design.
Are you sure? yes | no