 Tim Wilkinson
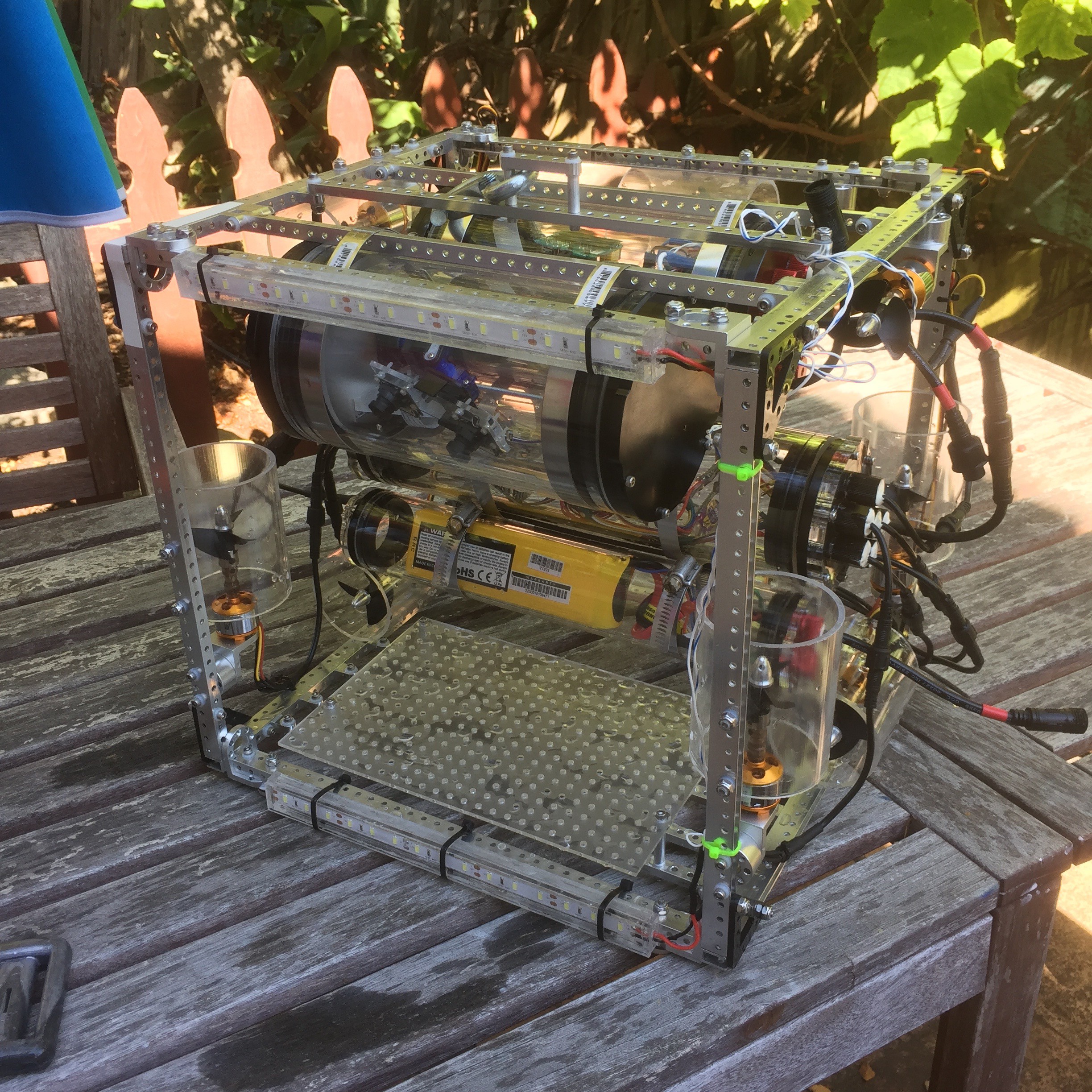
Tim WilkinsonBack in the pool today after a series of major upgrades. The main electronics boards in now on revision 1.2. Mostly this is just fixing various error from 1.1, although it does include lots more servo connections (for later robot arm use) and a beefier current resistor for monitoring the main battery. The motor controllers are now in their own air tight tube, and the battery (a LiPo now) is mounted in a separate tune underneath. You can see (vaguely) the layout in the below picture:
With the four z-axis motors attached (the ones pointing up-down) I finally had chance to work on calibrating the PIDs. The PIDs essentially keep the ROV stable in the water based on the input from the IMU. A made some good process here. The current weight distribution of the ROV is not good, and without power is sinks down farther in one corner. Once Balance mode is engaged, the current PID values bring the ROV back into a neutral position - success!!
However (because there's always one of those) once the motor control boards start to draw about 60W from the battery, the polyfuse on the board triggers and the motors reset. The voltage is about 12V, so that's only ~4A, or 1A per ESC. That's not very much and the system can certainly handle more power. I'm going to investigate switching the polyfuses.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.