 Tim Wilkinson
Tim WilkinsonThe ROV is going to have stereo vision. That means two cameras. I also want to give the vision a bit of flexibility, so that means some sort of gimbal. The two cameras, as discussed before, as PI cameras that use ribbon cables to plug directly into the Raspberry board. The need to be mounted about 60mm apart. The waterproofing is being provided by the front tube; I just need to work out how to mount the cameras on a gimbal, and how to secure the gimbal in the tube.
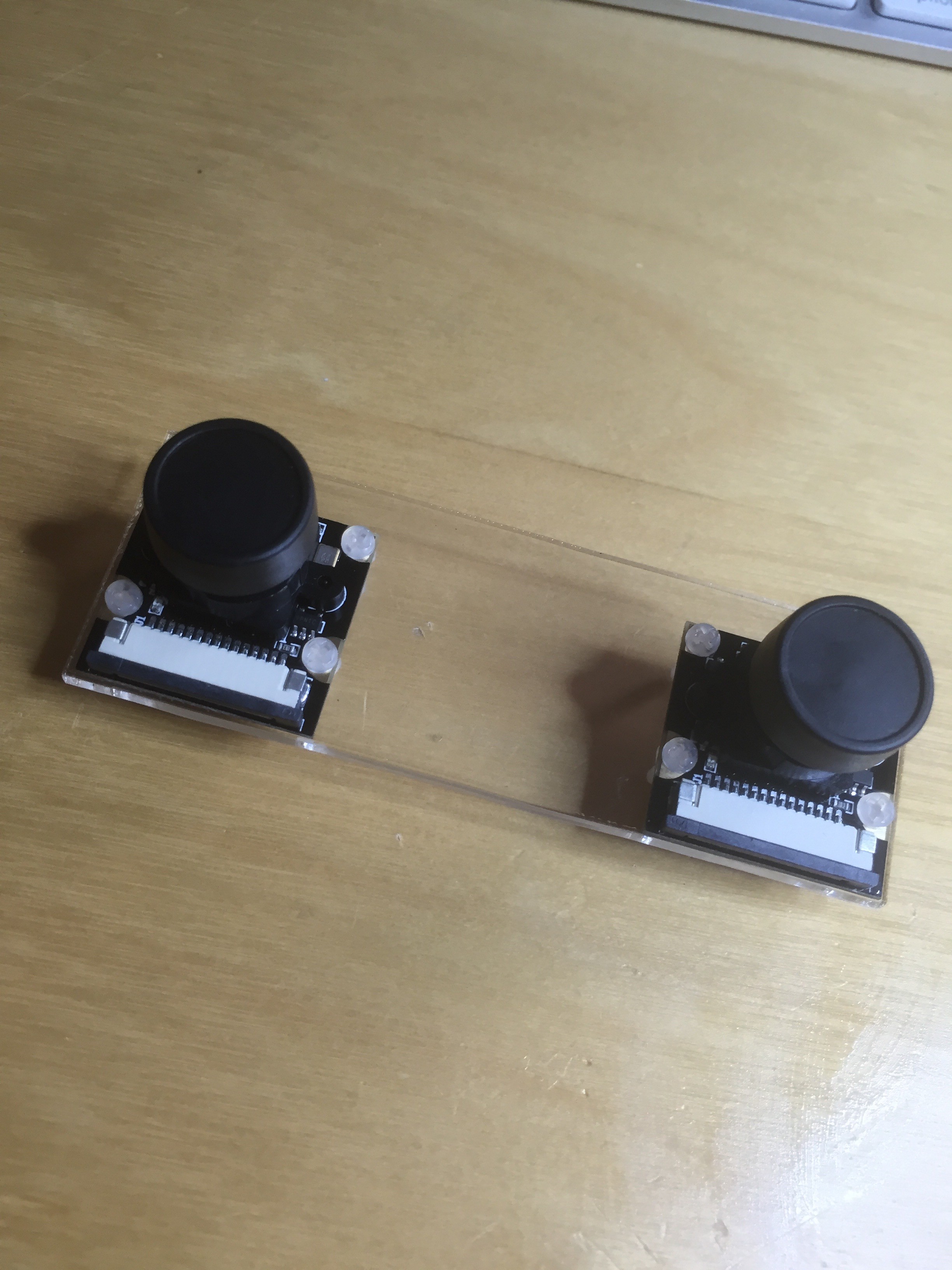
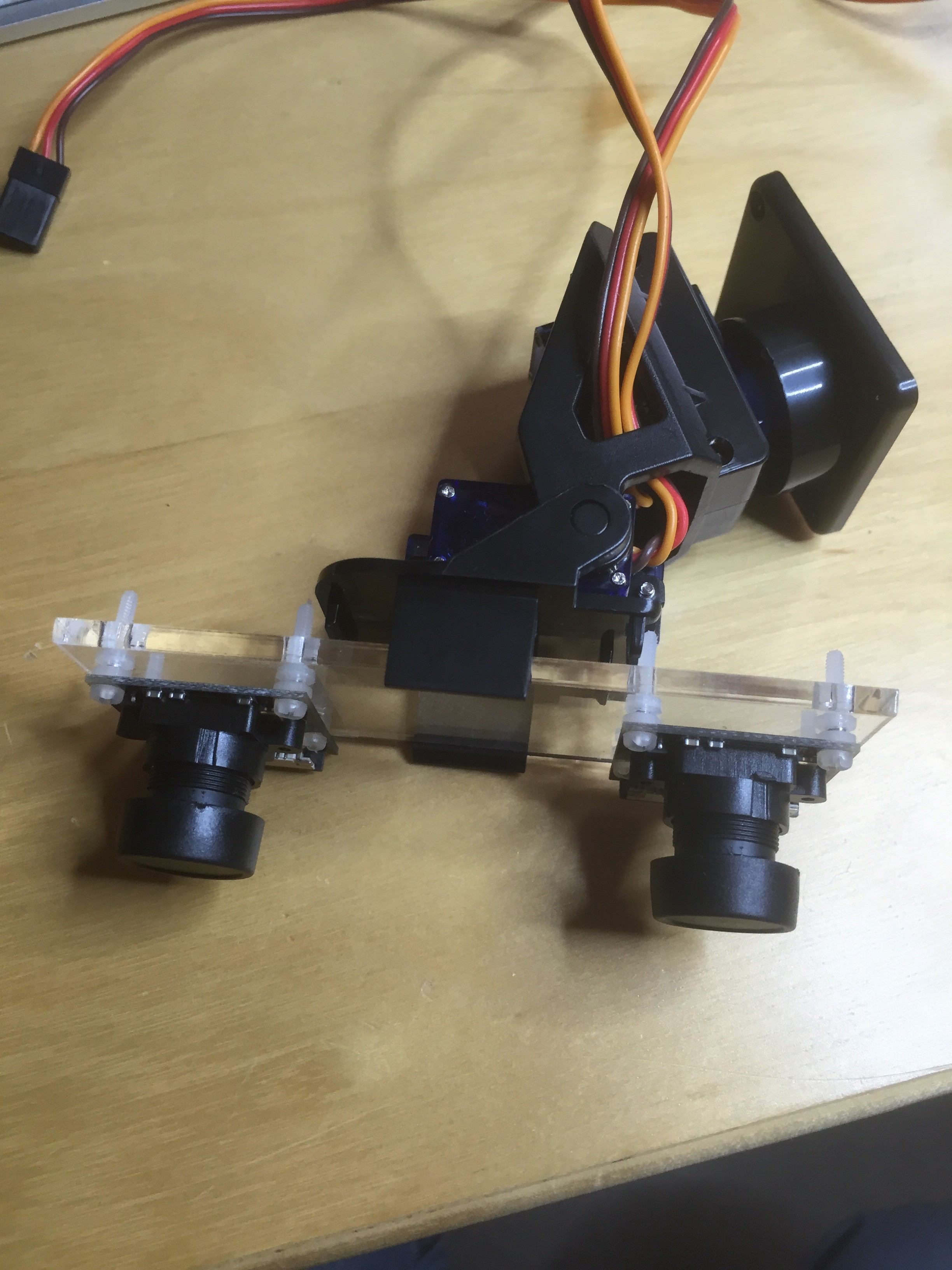
I picked a cheap gimbal from EBay and added the two cheap SG90 micro servos to get the movement I needed. To mount the cameras I laser-cut some acrylic with mounting holes,

bolted the cameras to the plate,
and then clipped it to the gimbal.
The final problem was how to mount this whole thing in the tube. I didn't want to use glue because I'm sure I'll want to remove and modify things later. However, mounting something on a smooth circular wall wasn't obvious. In the end, I build a harness with two circle acrylic ends,
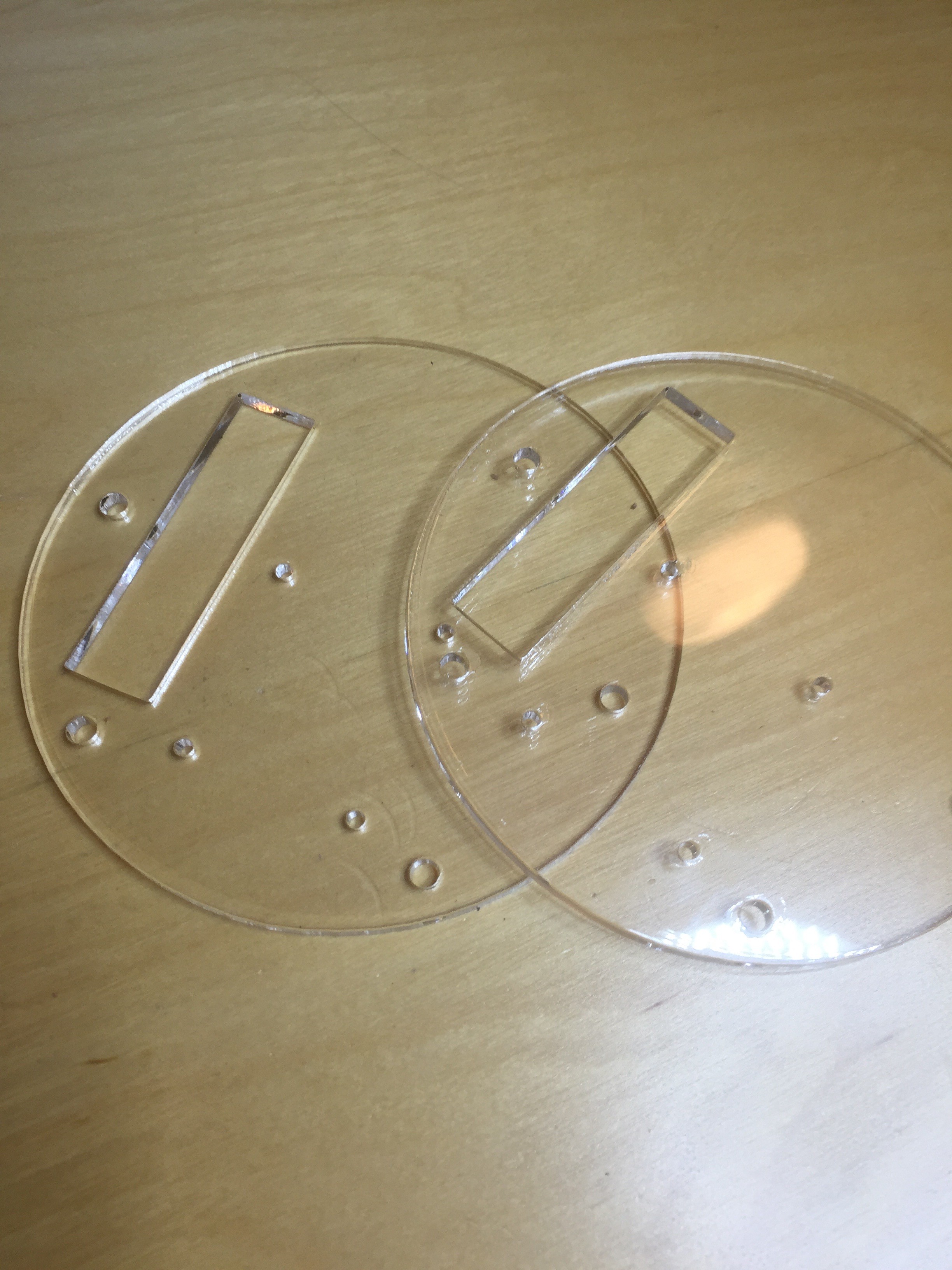
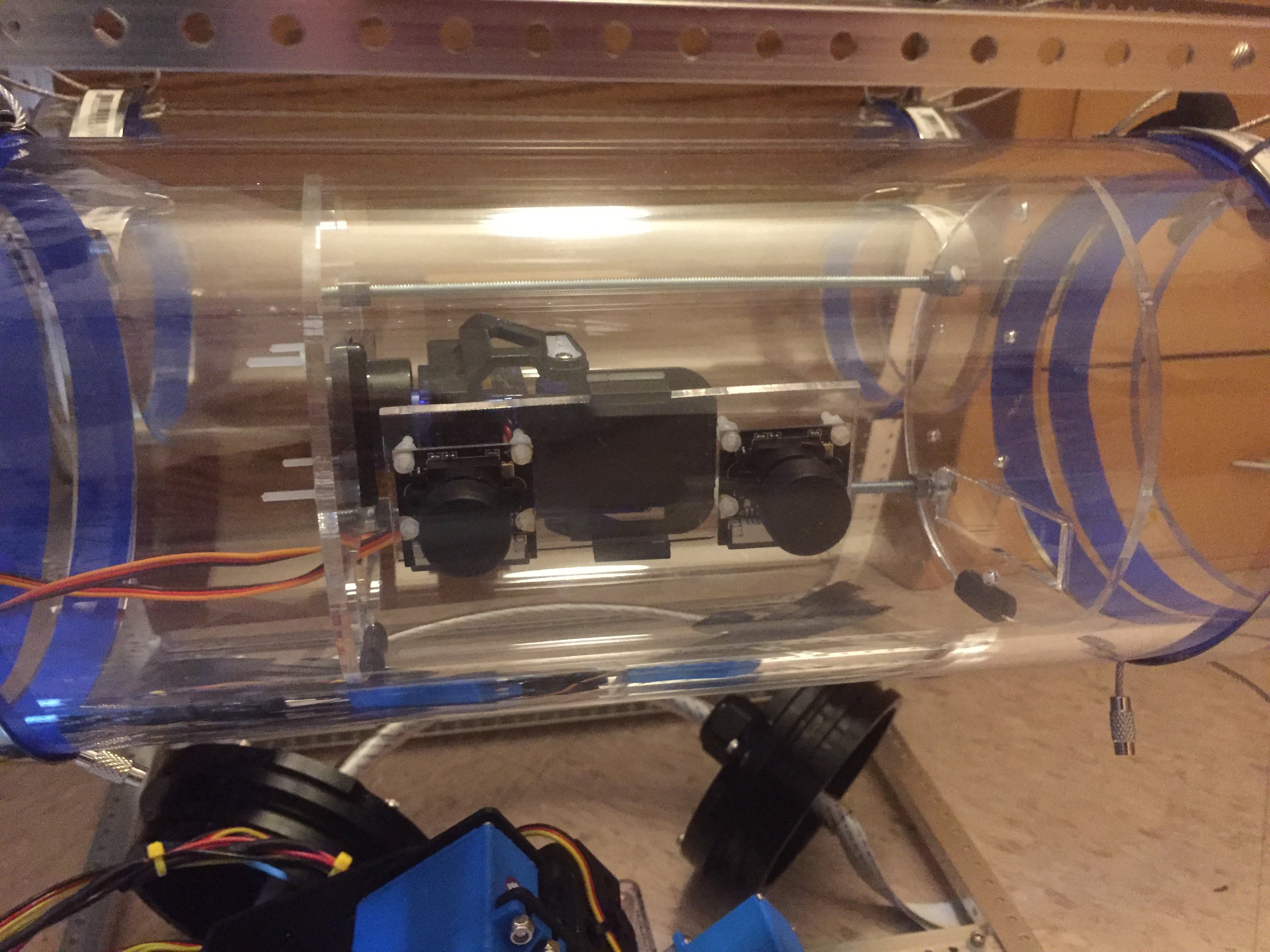
connected using two threaded rods, and secure inside the tube using neoprene edge trim. The resulting assembly looks like this.

And inside the tube:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.