 Tim Wilkinson
Tim WilkinsonSo after dismantling the old, slightly burned-out, ESC board, I've decided to abandon this specific ESC approach and put all the ESCs into a water tight vessel just like the rest of the electronics (i.e. option 2). When I was originally designing the ESC system I'd imagined I'd be providing power from the surface. However, when that was demonstrated to be impractical, I added an additional water tight cylinder in which I put the batteries. There's quite a bit of extra space inside this tube, and if i switch the endcaps for ones with more penetrators, I can bring out all the ESCs.
However, I do need to build a new ESC power board since that design is essentially the same. So I can feed ESCs out of both ends of the tube (with batteries in the middle) I designed a simple PWM board for 6 ESCs and will place two board in the cylinder. The Eagle version of the board is below.
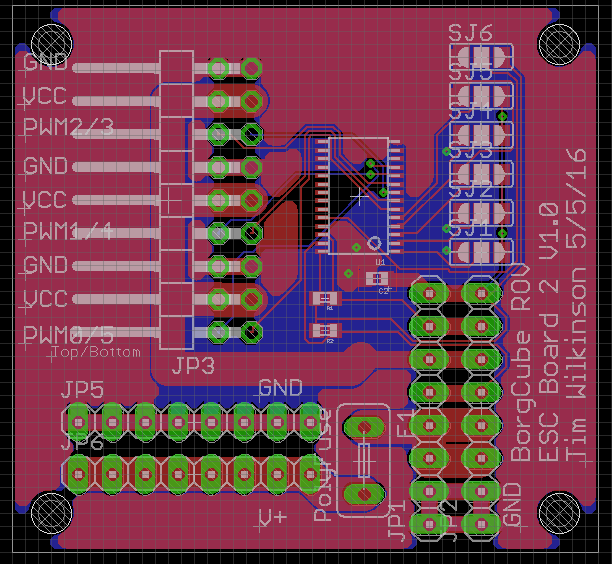
To be honest, this isn't much different from the Adafruit PWM board I often use in testing. But this board is setup for my bus design and has specific places to solder the ESC power cables. I also threw in a spot for a polyfuse, which would have been a very good idea the first time round.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.