 adamcatley
adamcatleynanoARC is a 1.5x1.5cm robot controller that is controllable over Bluetooth Low Energy (BLE 4.0). It is capable of independently driving two DC motors and a servo/ESC. It was designed specifically for antweight robots to be as small as possible while remaining customisable for different types of robots through software options and a range of optional expansion boards (such as extra motor drivers and motion sensors).
nanoARC can be controlled from a range of BLE enabled devices like smartphones and laptops, which also allow gaming controllers to be used. Traditional RC controllers can also be used when a second nanoARC is used as a transmitter with the correct expansion board attached.
The PCBs for the mainboard and expansion boards are designed on Upverter, linked on the project page. The firmware that runs on the TI CC2640 microcontroller is available in the GitHub repository. TI-RTOS, TI's BLE stack and CCS is used for development.




 Mark Arnott
Mark Arnott
 Justin Maynard
Justin Maynard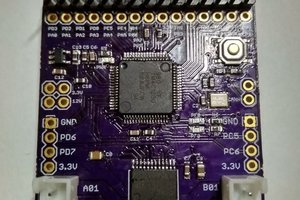
 Ben Lim
Ben Lim
Please make sure to upload photographic or video proof of this project working by the next deadline (in about two days!)