 Nigel
NigelAnother vital sensor
for MagiLog is GPS. With GPS we'll be able to get references for position and
velocity/heading. Additionally it offers two timing features that I might find
useful. GPS logs have an accurate timestamp and most GPS modules have a 1PPS output that can be extremely accurate. The
GPS module I had originally chosen was the Skytraq Venus638,
as it offered the highest refresh rate I could reasonably find and it also had
very good reviews. It has a 20Hz update rate and 2.5m accuracy. It communicates over
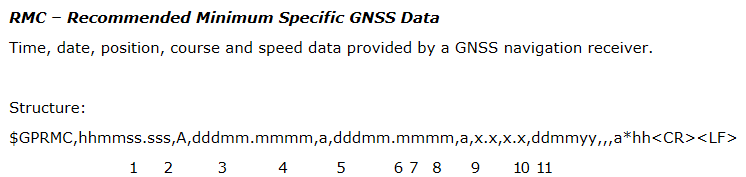
UART and uses structured payloads for data transfer. It has since been replaced by the Venus838 which offers 50Hz update rates. I'll move to that sensor once I start building boards but for now the 638 will suffice. The 638 uses the NMEA 0183 standard and has a few different standard data formats. The main one
we're interested in is the RMC message.
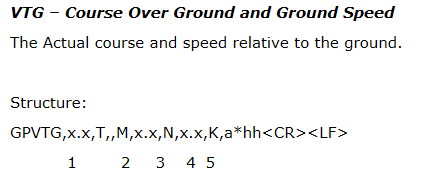
Another message I'm thinking of using is the VTG message. The reason I'm considering it is that it gives us speed in km/h in addition to knots, that means we should be able to get a 1.85:1 improvement on ground speed resolution.
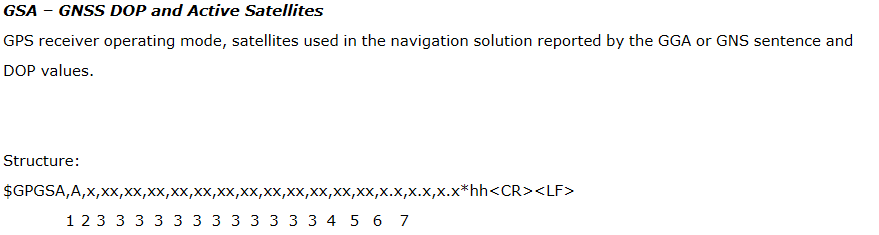
During the dev phase another message that will be useful is the GSA message which will provide us the GPS DOP, with this data we can test different antennas and start to collect data on accuracy in various conditions.
I first started trying to interface with the sensor using my Bus Pirate, and while I was able to get it to stream data to terminal, I was having difficulty writing to the device to change parameters. I then tried to interface to the GPS over a COM port using the manufacturer supplied application.
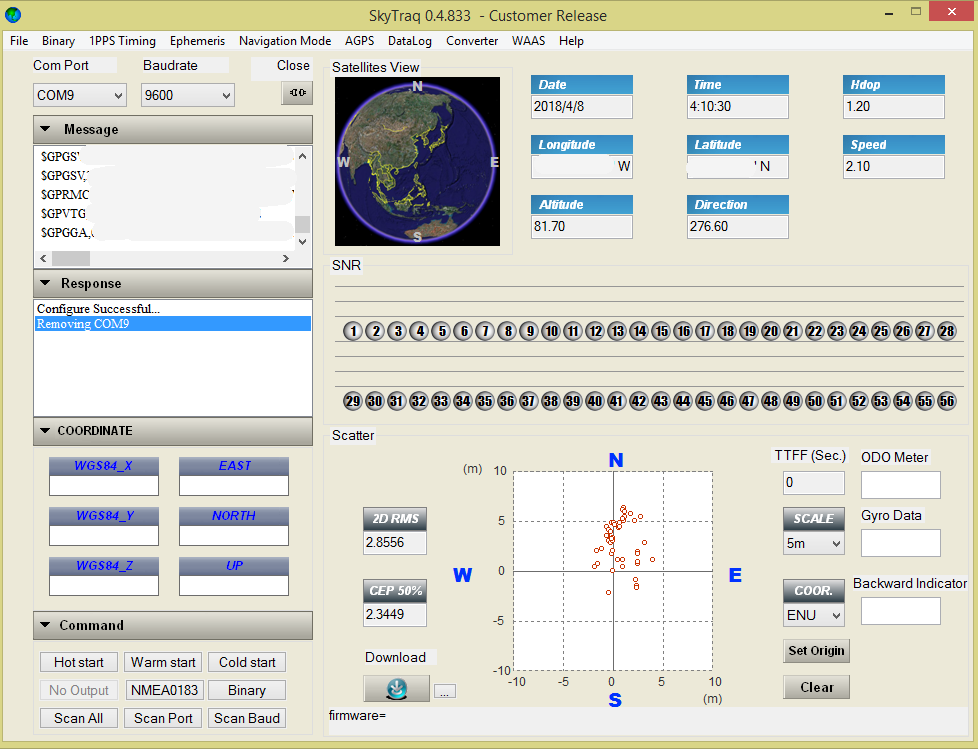
Using this connection method everything was working fine. I needed to dig in a bit more to figure out what could be going on. To do this I used my Saleae (Original) Logic. Connecting it in parallel to the Bus Pirate and Pololu adapter I was able to compare the two to start trying to debug what's going on.
Here's the log for the working Pololu communication:
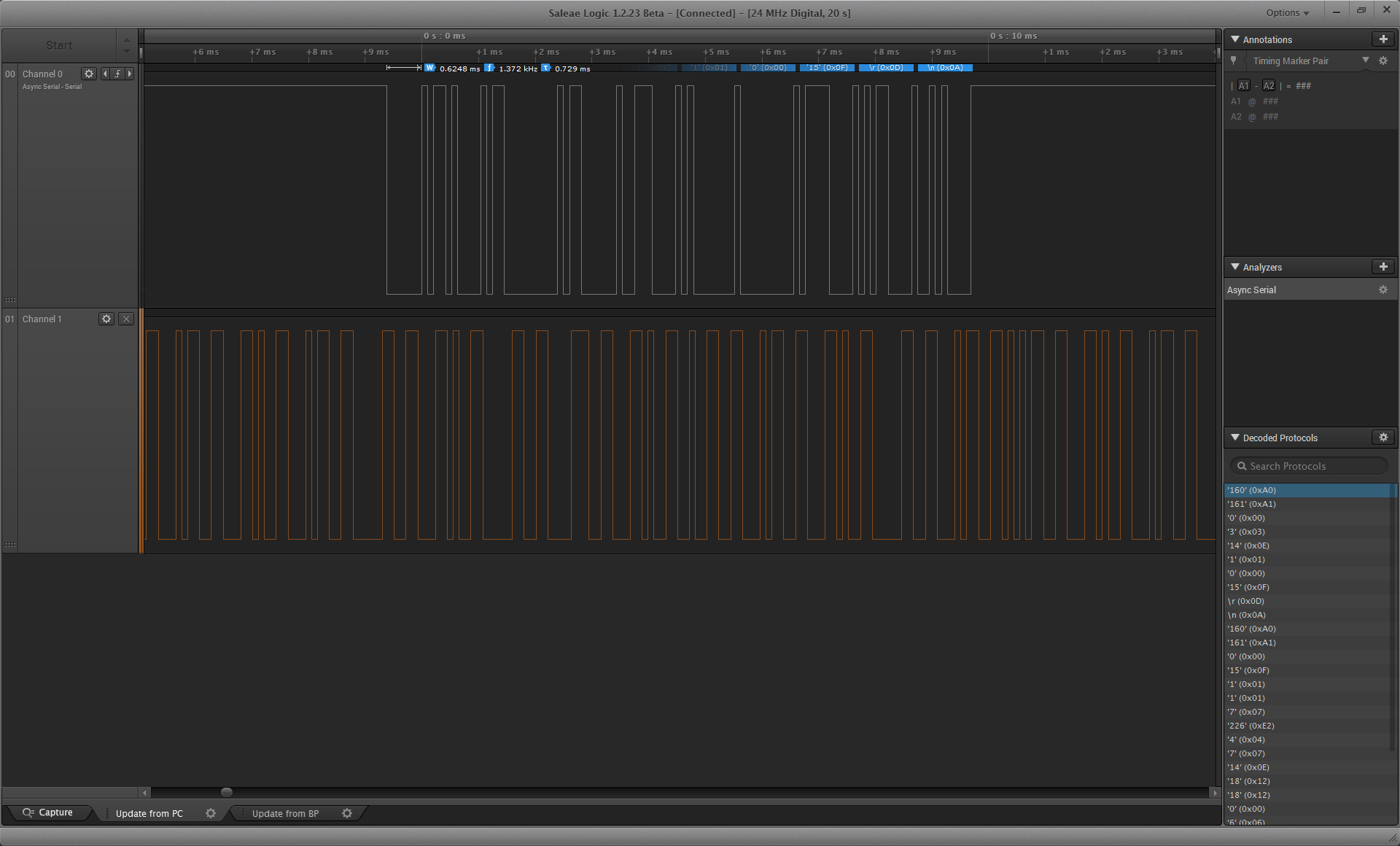
And here's the Bus Pirate message:
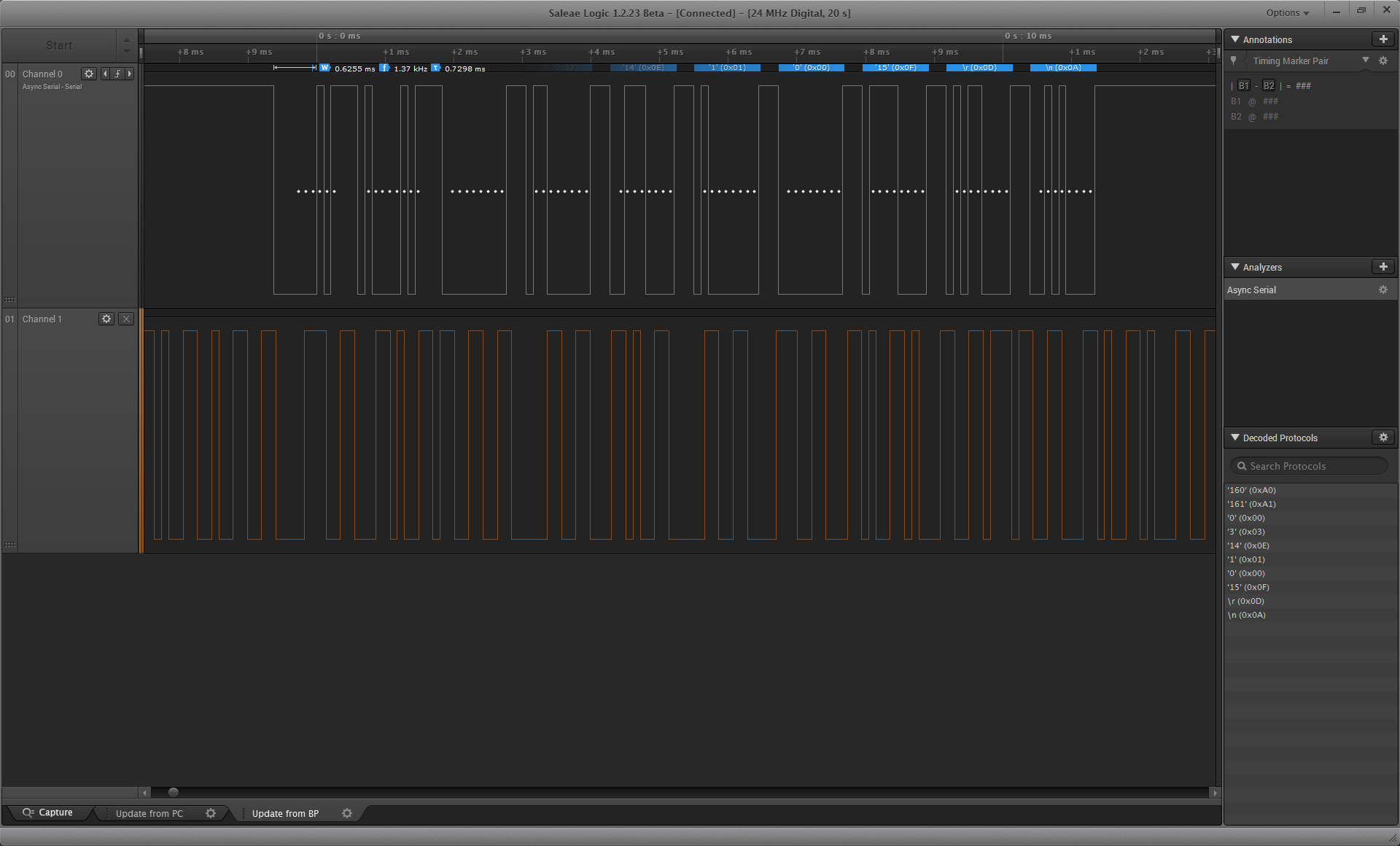
As you can see, the timings are very similar (within a normal margin I'm pretty sure), and on the lower right hand side you can see that the first message sent, which was the change refresh rate command, was the same in each case. So right now I'm a little stumped, I'll keep probing around and post an update with more details and the solution to my woes once I've solved the riddle.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.