 Alex Martin
Alex MartinJust submitted an order to @oshpark!
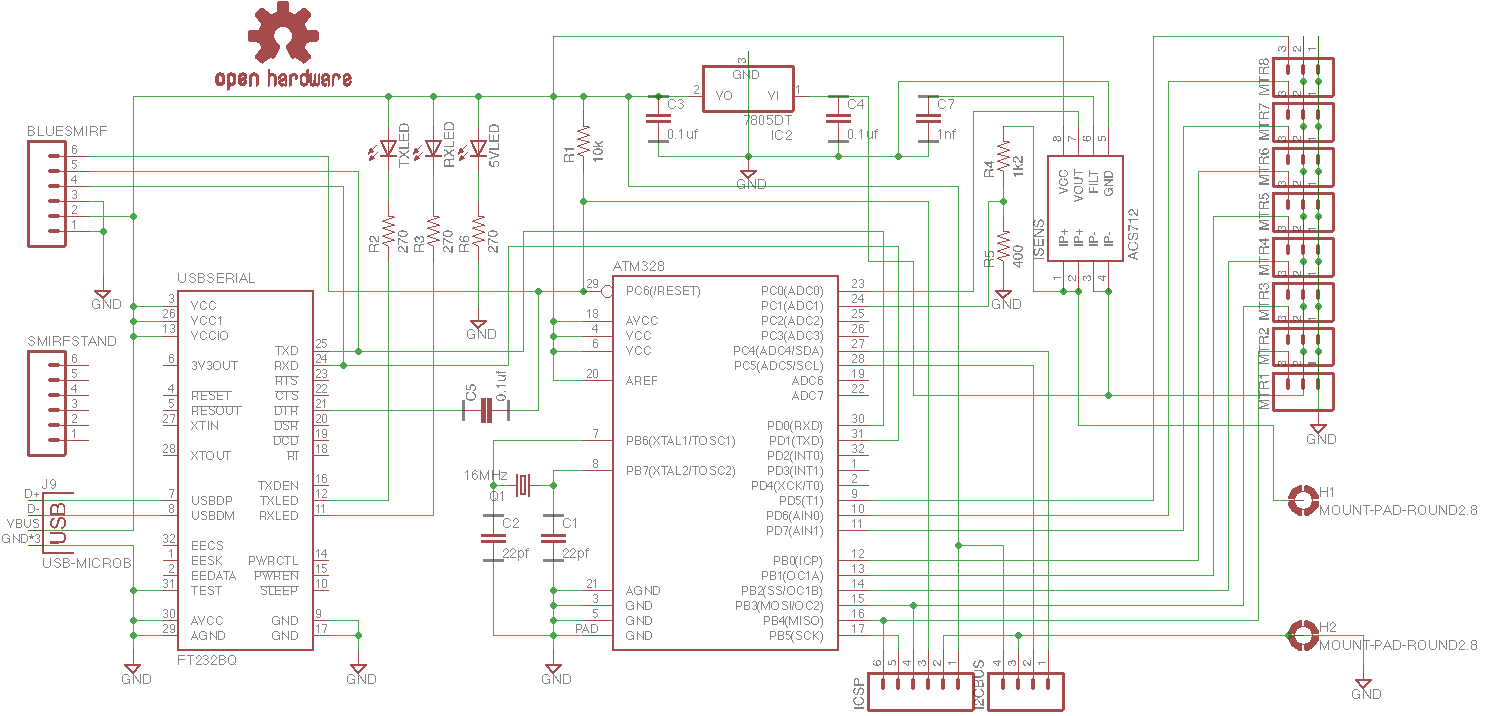
This board is based off the incredible Botboarduino by Lynxmotion (http://www.lynxmotion.com/c-153-botboarduino.aspx). It has some features removed (speaker, some IO etc), and some features added. The new additions are:
- Current sensing (ACS715)
- Bluetooth (BlueSMIRF)
- Juicier battery traces with ring terminal connectors
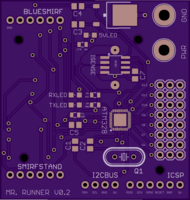
The premise of the design was to keep the components as tight as possible (hence mostly surface mount), have the servo connectors / power connectors on the same side, and the USB connector opposite to the servos / power. This board will be mounted in the rear body of the robot (not much space!) so it needs to be concise and well organized.
Schematic:
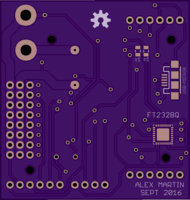
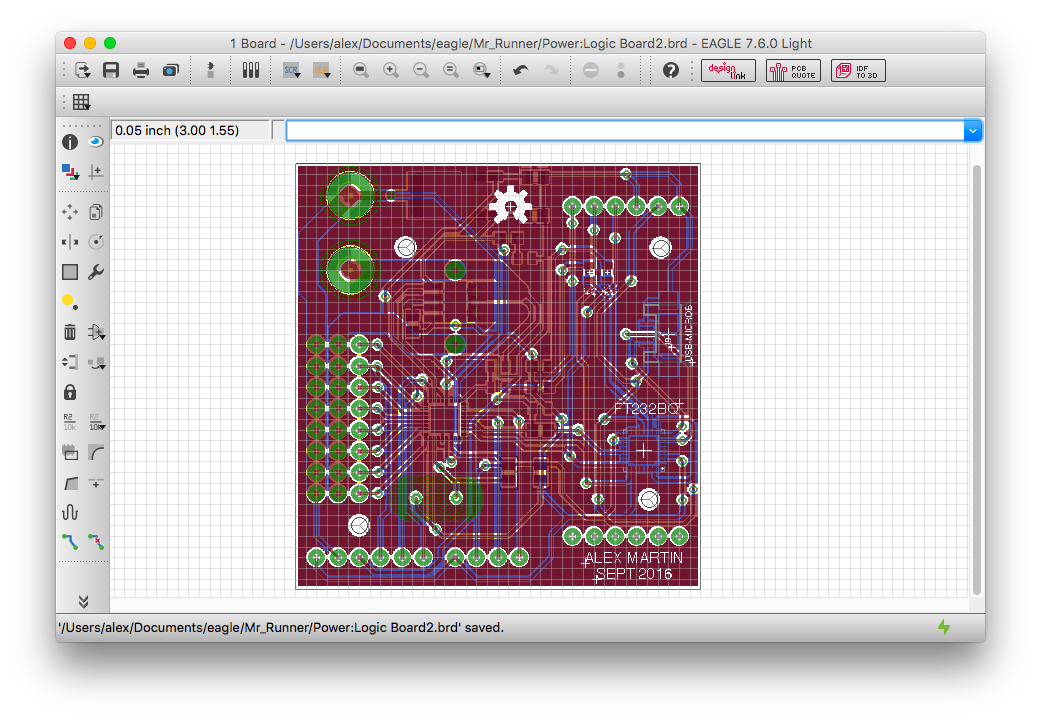
Board view:
I got lucky and the design was sent off the fab immediately after it was submitted, so the boards should be here in around a week. Alright!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Awesome project! We look forward to future updates
Are you sure? yes | no