 Alex Martin
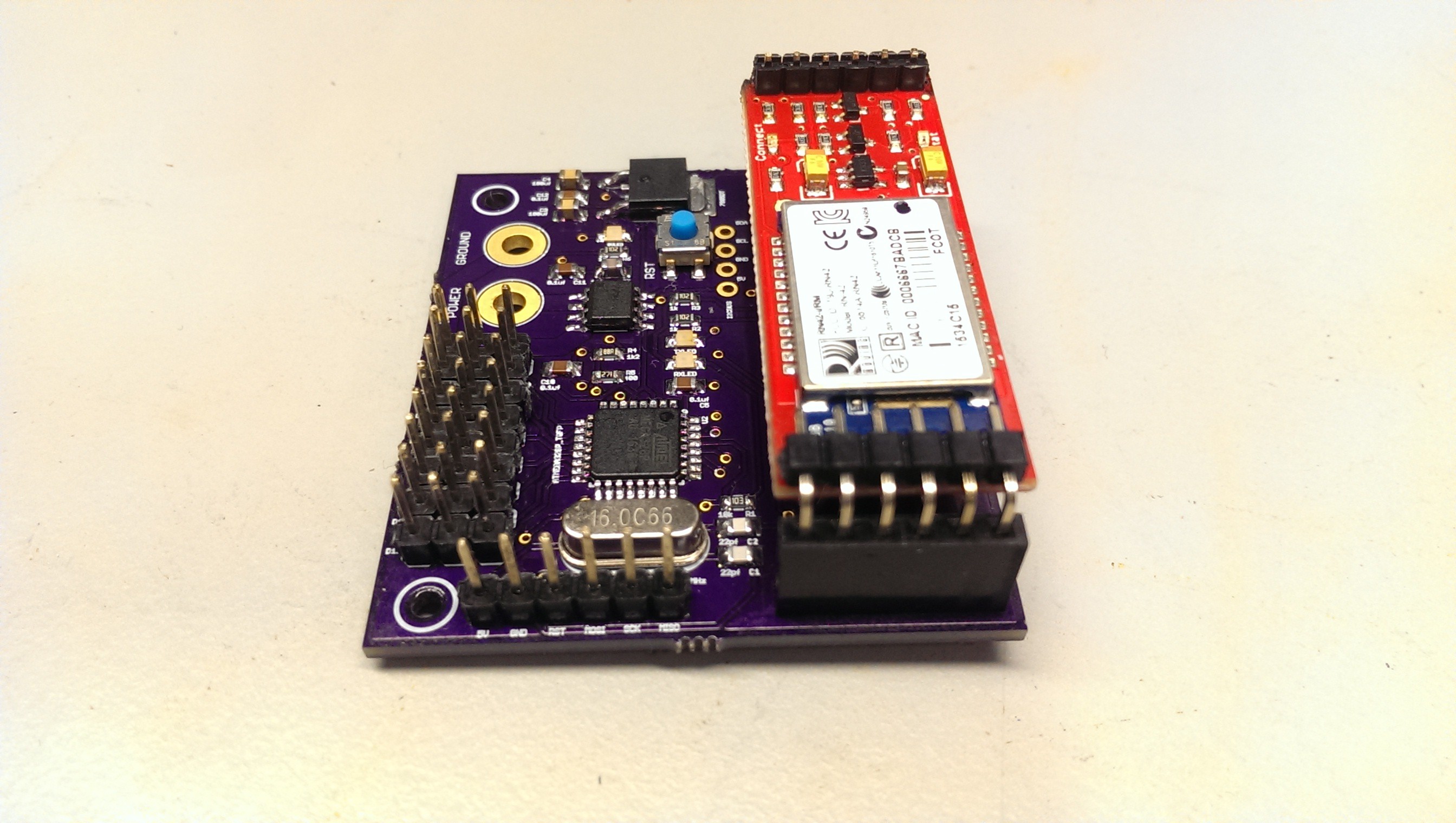
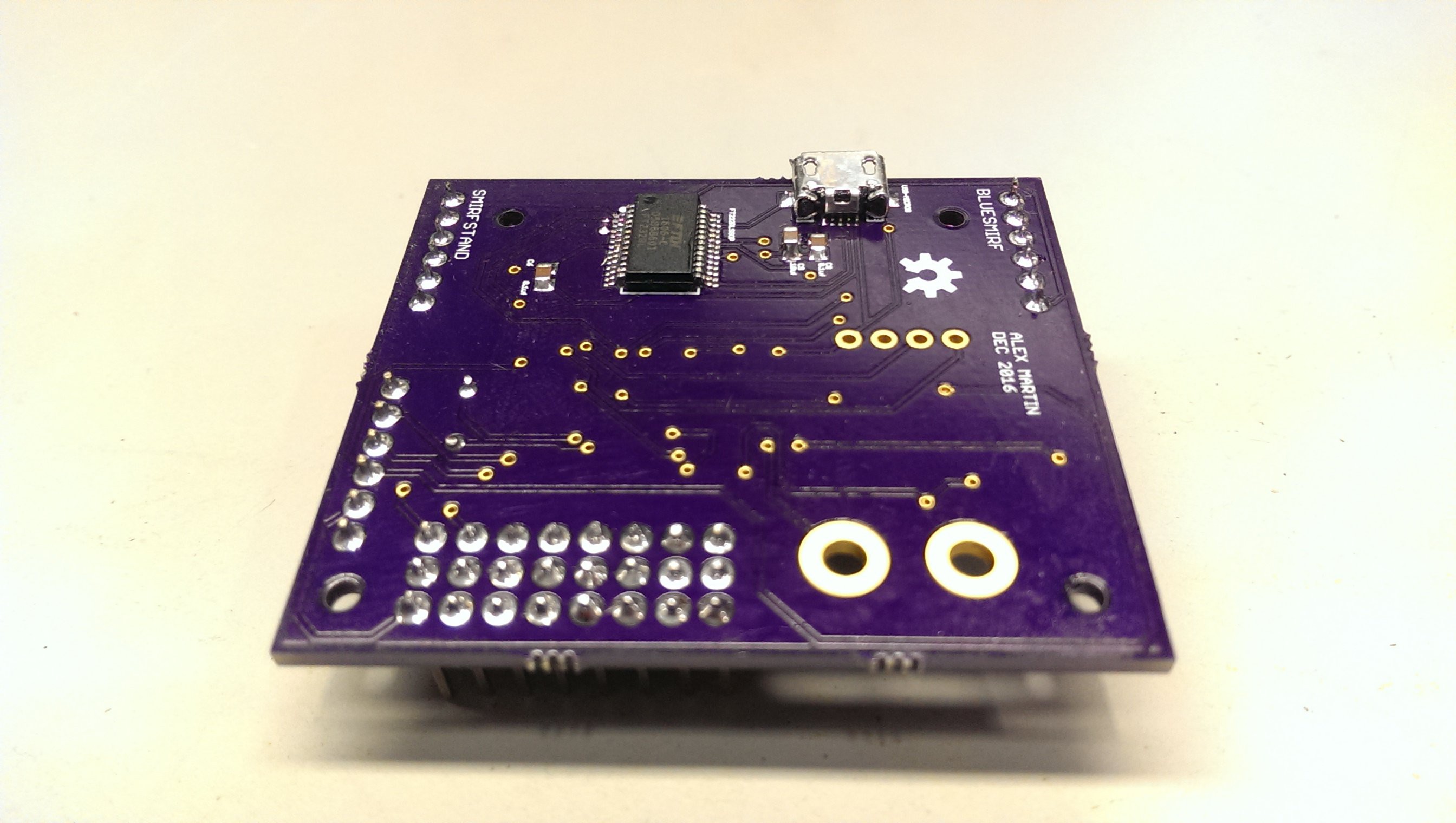
Alex MartinThis is an improved version of the board discussed in a previous log. The main difference is that this one works.
Changes include the removal of QFN packages, better spacing, and proper trace routing.
The primary area for improvement here is to integrate the bluetooth module into the main board.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.