0%
0%
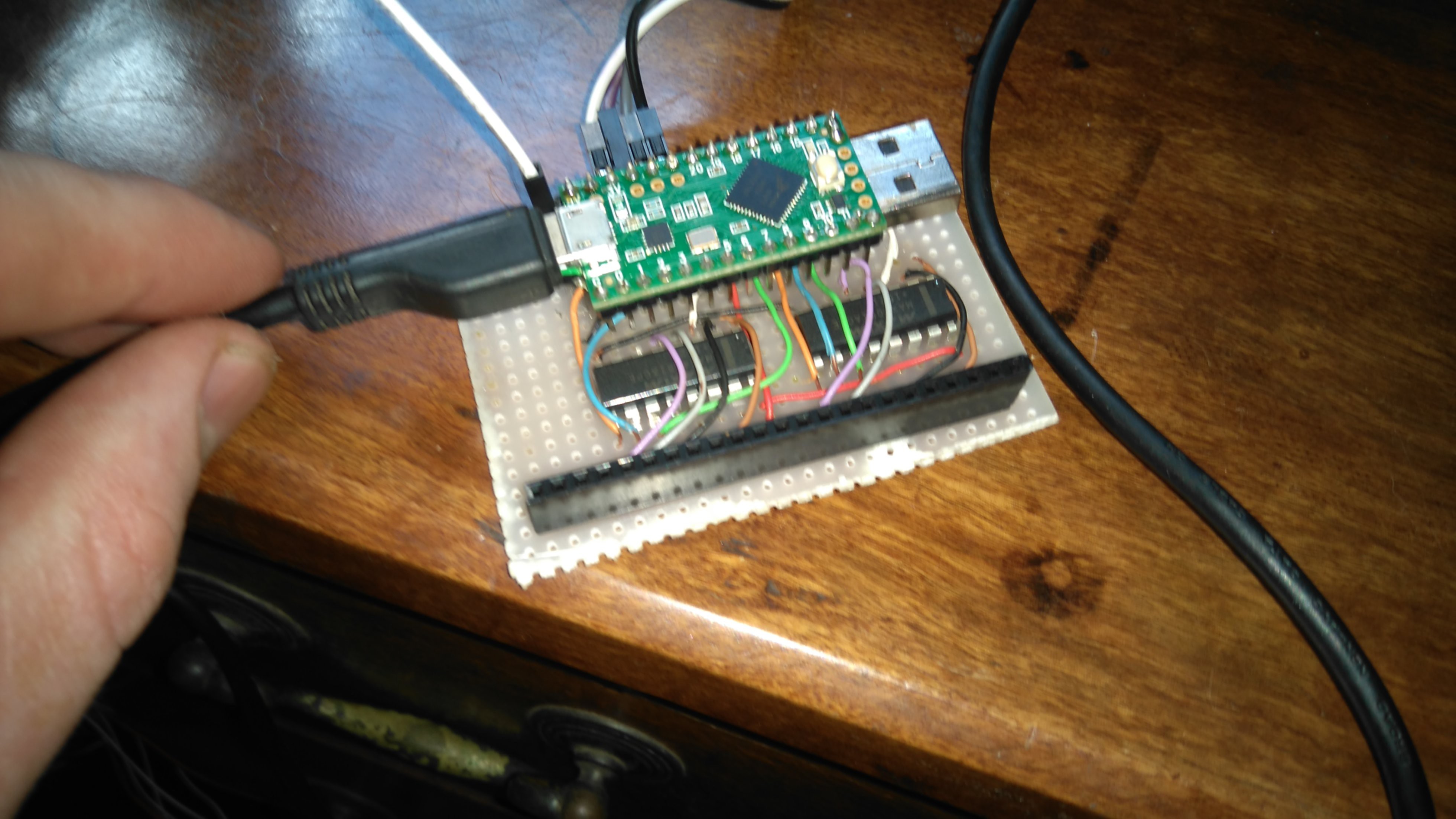
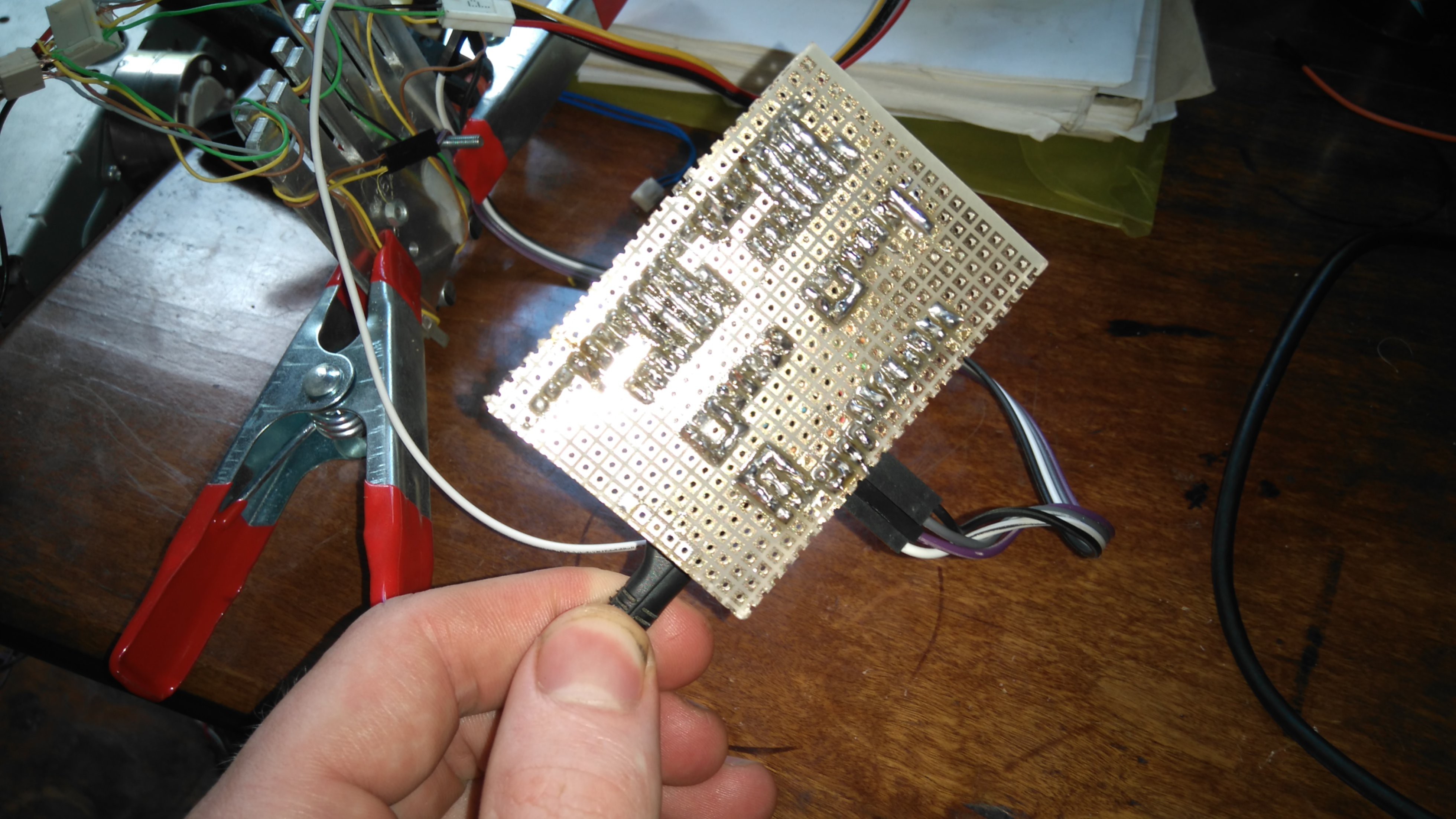
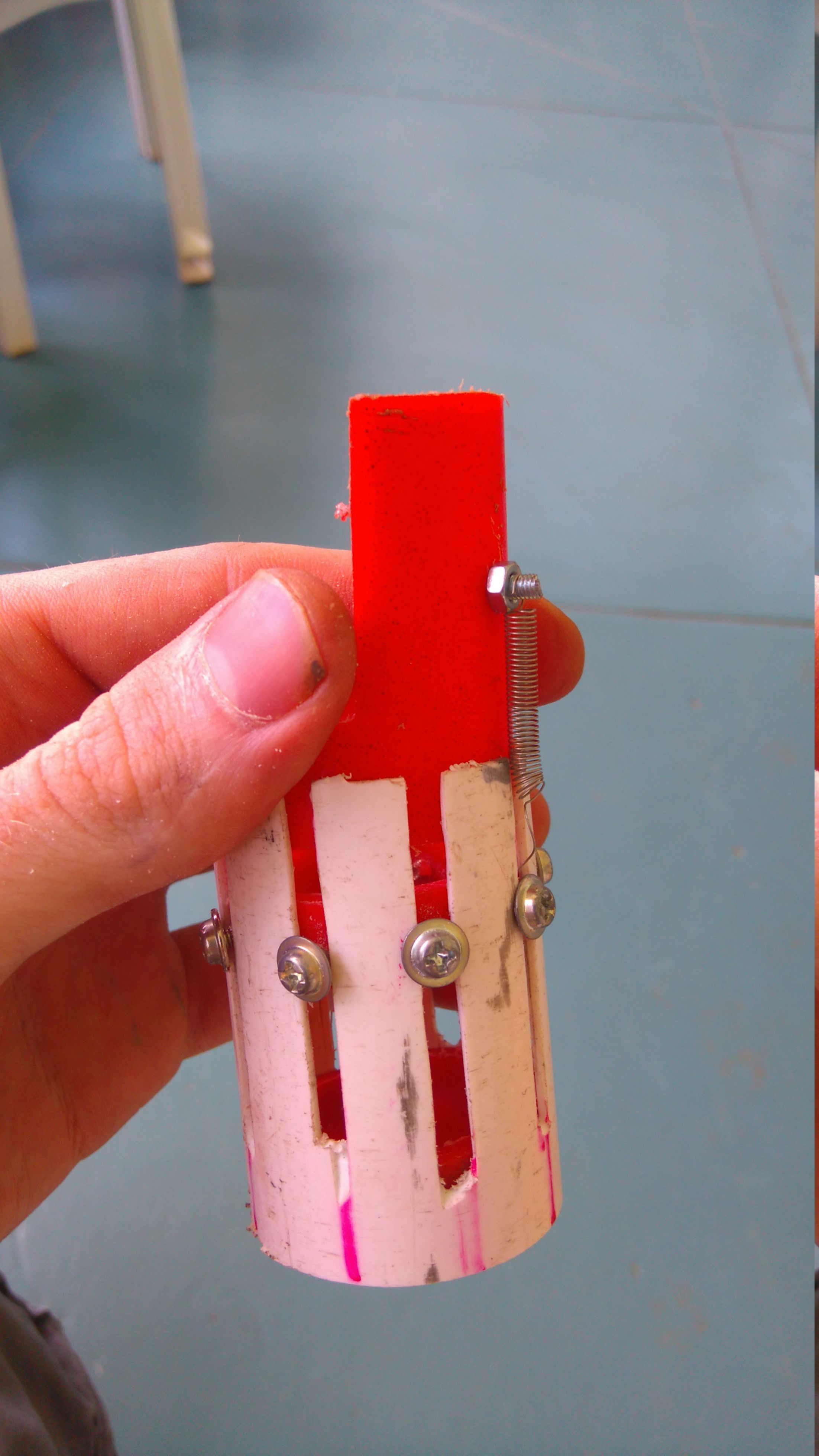
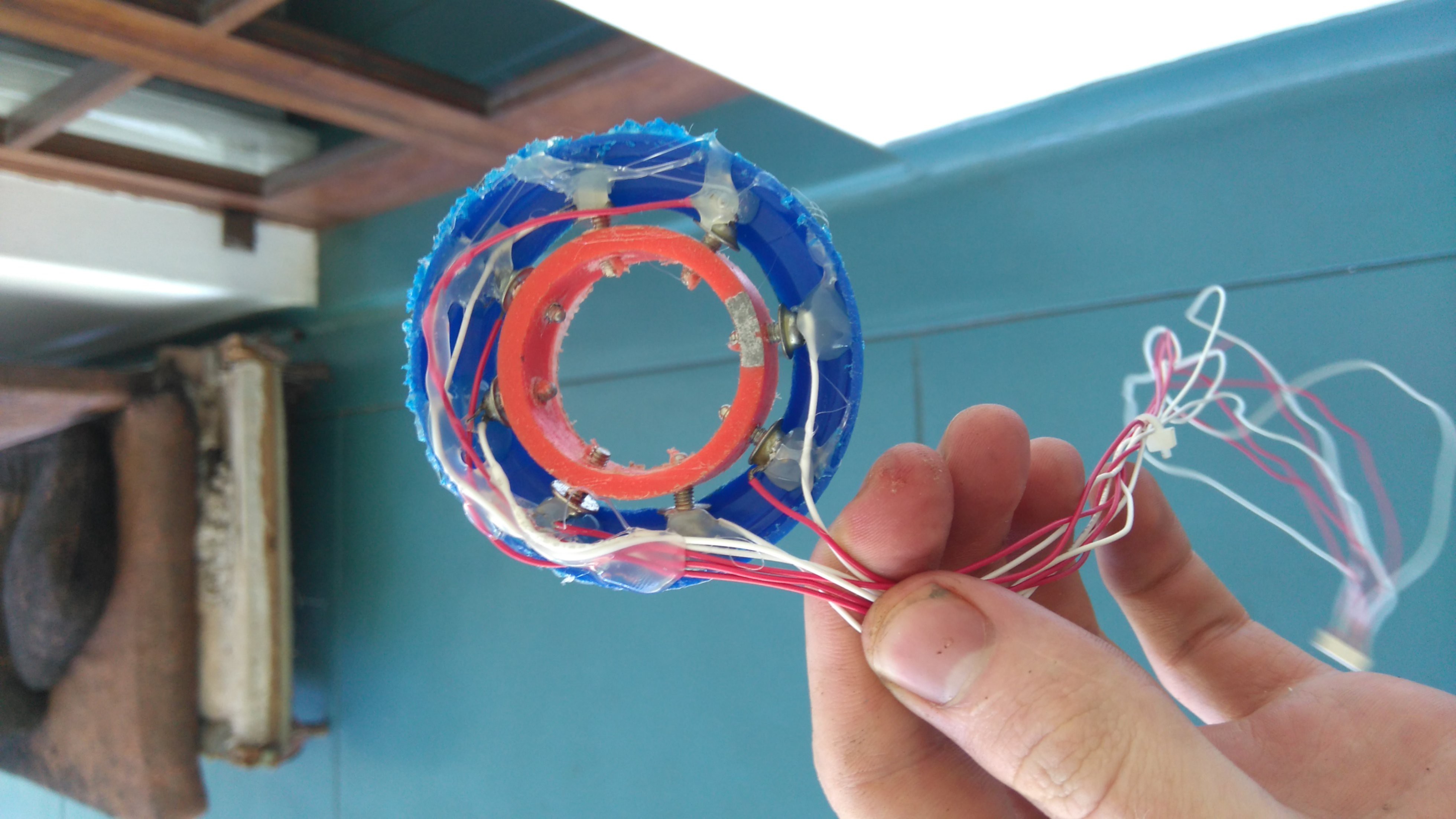
Scanning EIT Imaging System (SEITIS)
Using electrical impedance tomography to scan body parts in high resolution by scanning with a e-waste axis system. NOT A PRIZE ENTRY
 johnowhitaker
johnowhitakerBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 Will F.
Will F.
 Nixie
Nixie
 caver.adam
caver.adam
 Drew Pilcher
Drew Pilcher
Color me VERY intrigued, I've got a bit of a soft spot for weird imaging systems