 Kenny.Industries
Kenny.Industrieswhile(digitalRead(soundPin) == LOW){
//keep the doppler effect mode activated
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
//get data
vib = abs(gz)/1000; //the gz variable is actually accelerator data
//this is calibrated though the division and simplified to use by absolute value
if(vibEnable == 1 && vib >= 2){
//though "blinking" the vibrato/doppler effect is simulated
//this activates only, when the calibrated acceleration value exceeds 1
myservo.write(vib*6 + 6); //outputs the digitally calculated value to the servo which feeds the analogue theremin circuit.
vibEnable = 0;
}else{
myservo.write(vib*6 - 6);
vibEnable = 1;
}
delay(20); // this is necessary, because the servo requires some time to move (about 60 degrees per second)
}
0%
0%
Singing Lightsaber
Simple theremin + poti + servo + MPU6050 + arduino = awesome sound effect
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Rowanon
Rowanon
 deʃhipu
deʃhipu
 ZaidPirwani
ZaidPirwani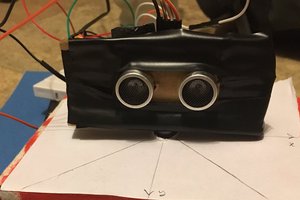
 charles.fayal
charles.fayal
Could you share some code on the doppler effect simulations? Right now I'm only using tone() for that plus the mpu6050...