 Laetitia BEL
Laetitia BEL(The work is ongoing, please feel free to give me your feedback!)
The platform Droni SAME70Pi starts to take form (in the imagination yet), it will have the following main parts:
- the TOP PCB that will handle the computation and the communication (2xSAME70@300MHz + RPi CM + ..)
- the BOTTOM PCB that will handle the power distribution (current sensors, DC converters, ESC powering)
- the IMU station, composed of redundant sensors
- the front sensors PCB, can be customized, and fixed in the front of the drone
- the remote controller, to control the drone and get the telemetry, it can be plugged to a computer
The platform is compatible with DJI 450 like arms (cheap and widely available)
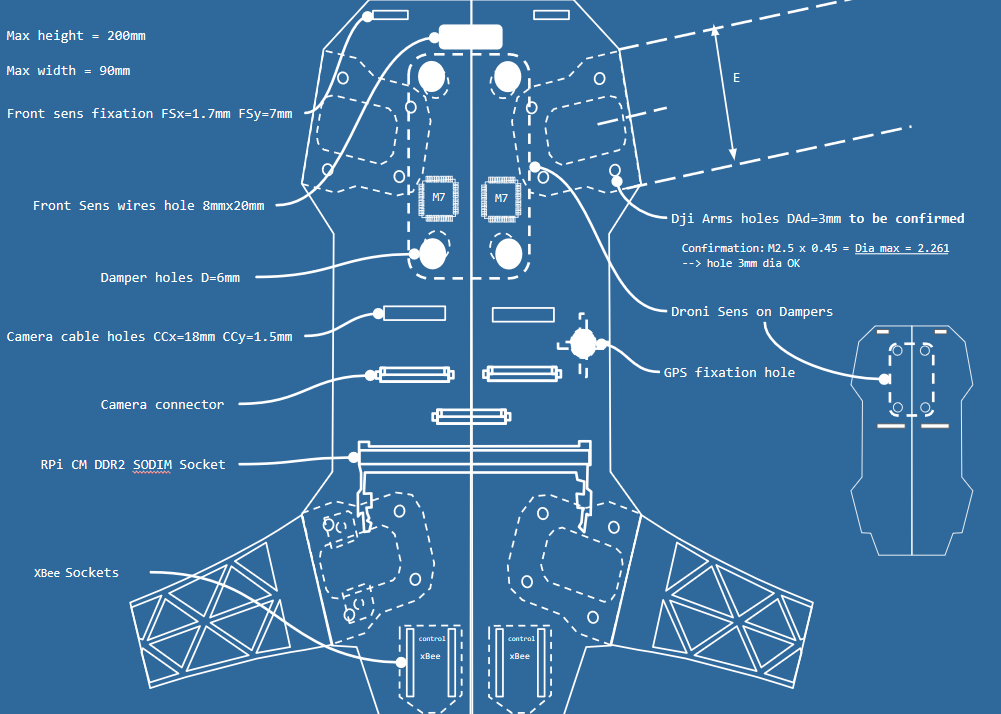
TOP PCB:
It will hold:
- 2xSAME70 @300Mhz: one for sensors aquisition and telemetry, the one for stabilization and critical computations
- a Raspberry Pi Compute Module (CM3 of course :) )
- the IMU station
- the dual Pi Cameras
- the communication modules (xBee x2, SDR?)
- the GPS fixation and connector
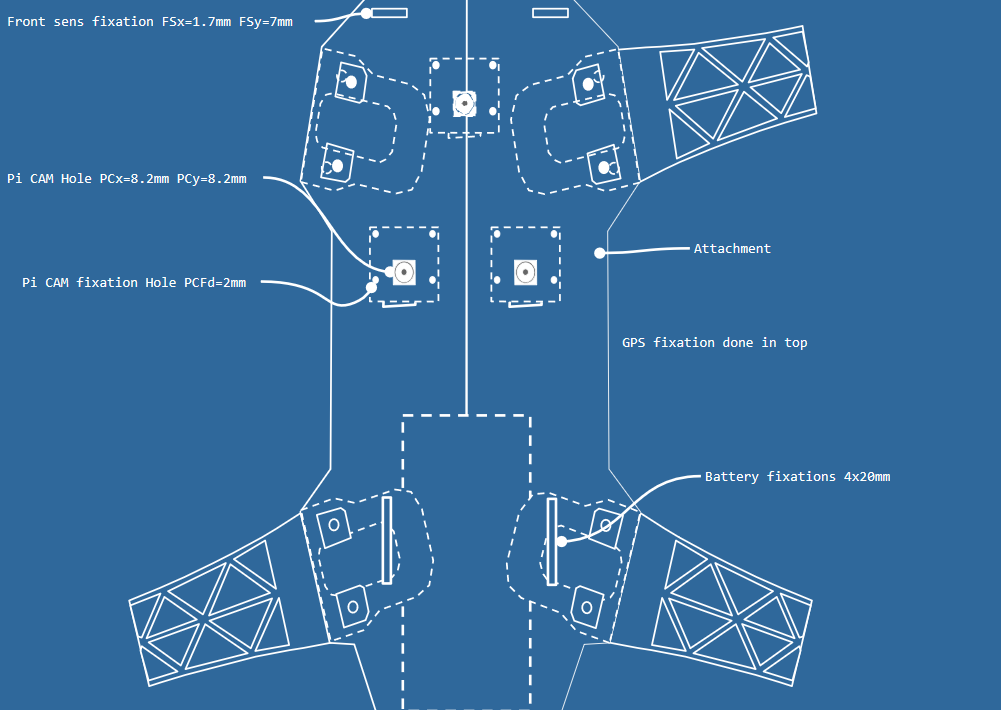
BOTTOM PCB:
It will hold:
- the power distribution for the ESC
- the LiPo battery (11.1 or 7.2)
- the DC converters to provide the 5V0, 3V3, 2V5 and 1V8 for the computation units and sensors
- the fixation of the Pi Cams if we need to record down images
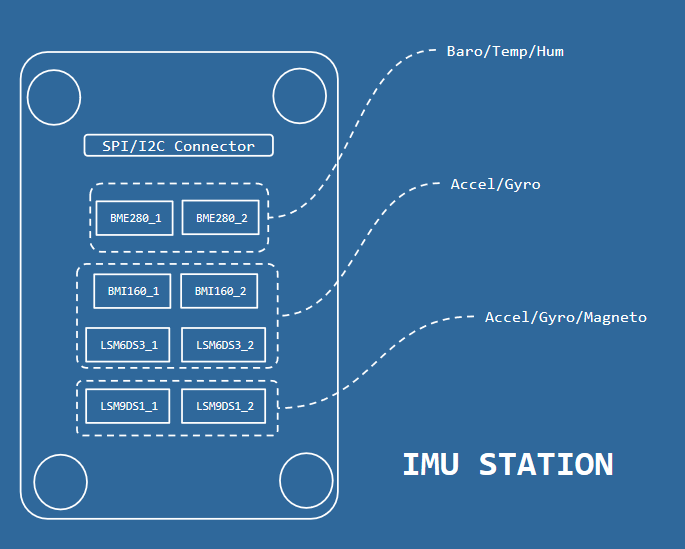
IMU Station:
It will hold:
- 6xIMU sensors, 2x for low acceleration +/-2g, 2x medium acceleration +/-8g, 2x high accelerations +/-16g
- 2x barometric and temperature sensors, for altitude estimation
- compass
Since I already used lot of IMU sensors for my drones, I have quite a good idea about which one I will use
The IMU station is mechanically independence from the TOP PCB, fixed to using dumpers.
Front sensors PCB:
It is a customization PCB, It can hold for example:
- gas sensors
- RPi Cams
- Infrared sensors
- all that can fit in the front PCB shape
For example, the front sensor panel can have only one Pi Cam and sensors
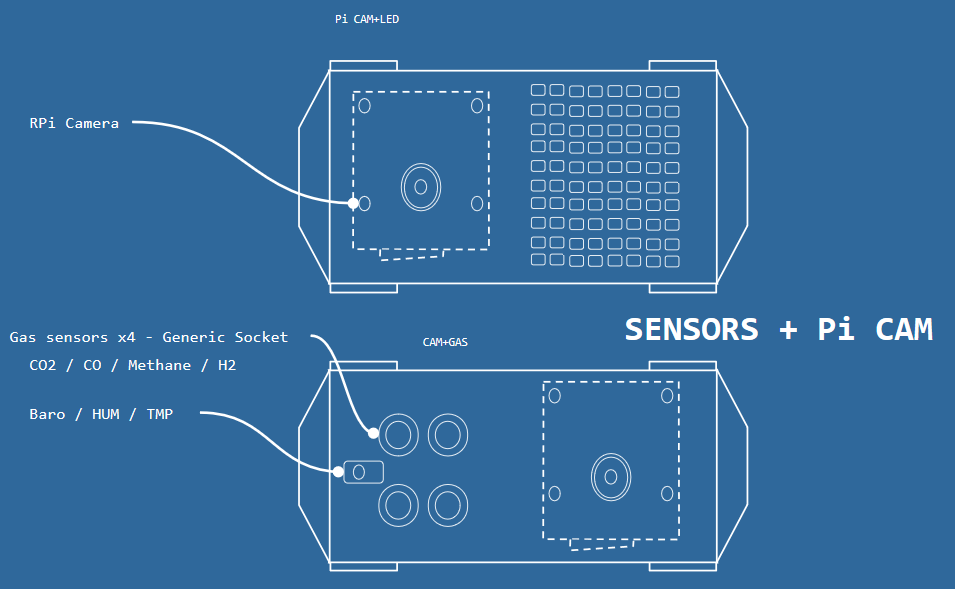 It is also possible to have a stereo-vision (or NDVI, Pi Noir) using 2xPi Cams associated with sensors
It is also possible to have a stereo-vision (or NDVI, Pi Noir) using 2xPi Cams associated with sensors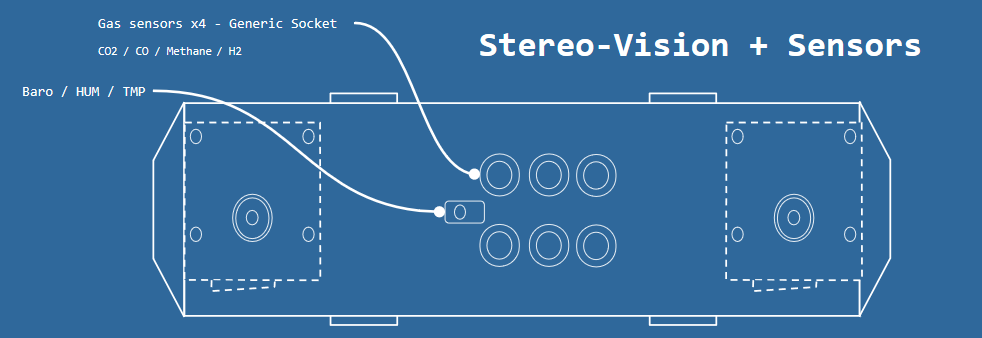
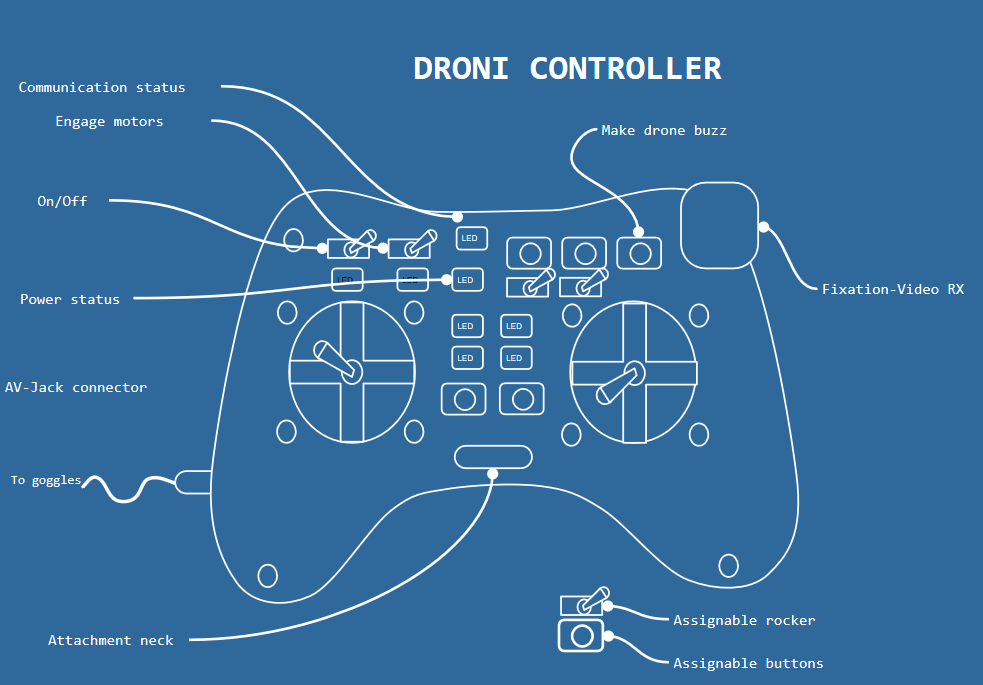
Remote Controller:
The idea from the remote control is to have a hackable one that can be pluged to the computer, to handle telemetery, and also to control the drone.
It will hold:
- a bunch of buttons, leds,
- 2x analog sticks
- communication modules (same as in the TOP PCB)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.