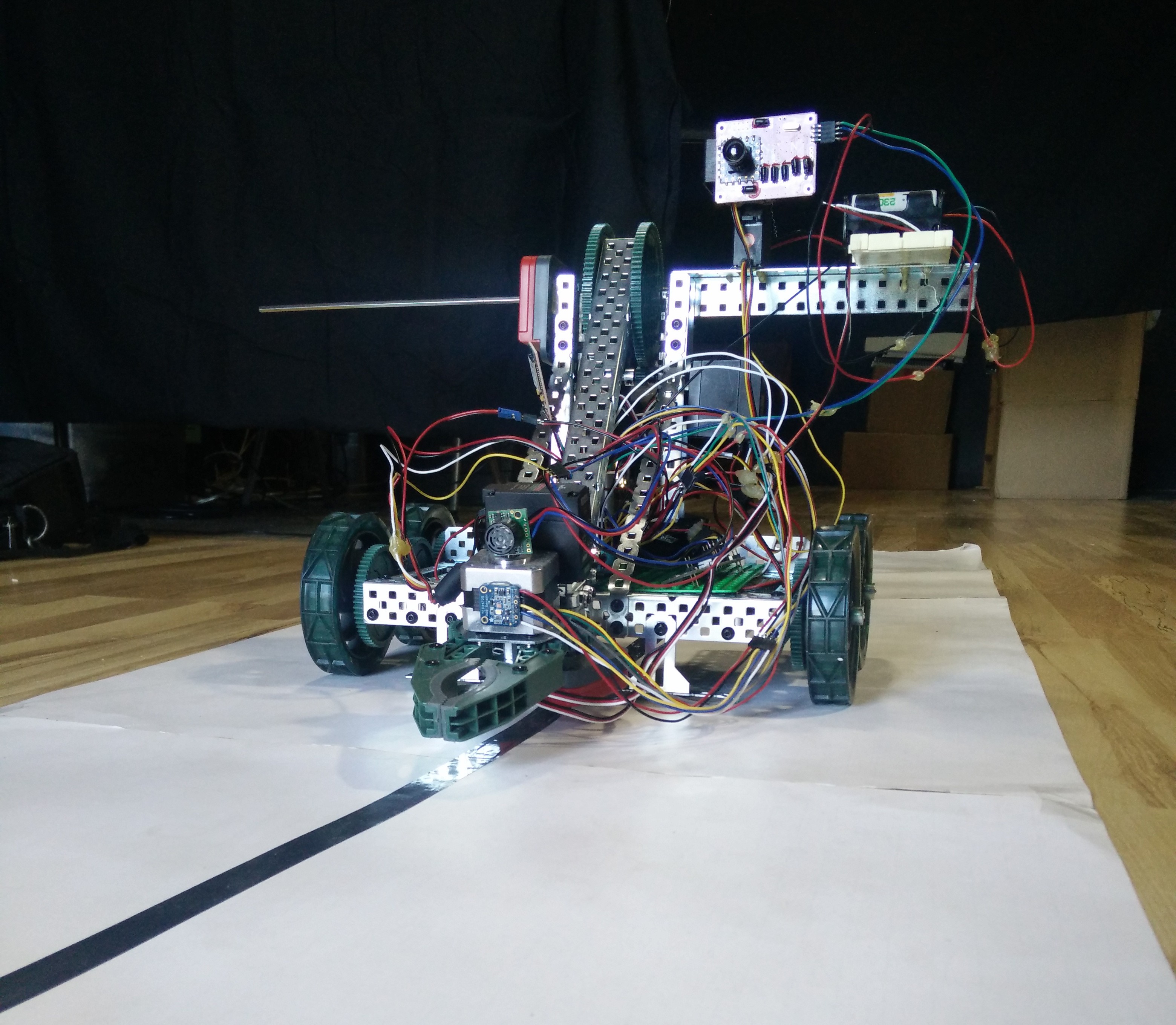
So in order to test everything out, I wanted to create a fully functioning robot that showcases all the functionality of the system. So I ordered a simple Vex EDR clawbot robot with DC motors as the base. This robot has two dc motors for the wheels, plus a DC motor attached to an arm and a DC motor for a claw. I attached 5 line following sensors attached to analog inputs, a stepper motor hooked up to one channel of the motor controller, I put a distance sensor on the stepper motor so that the robot can 'look' different directions, and hooked up the distance sensor to one of the analog inputs. I put a color sensor on the claw, so the claw can tell what color of balls it has. I put rotary encoders on the shafts of the claw and the arm, so that I could do PID control of the arm and the claw. I also connected two servos to a camera, so that the robot can 'look' in different directions with the camera and send pictures back to the control software.
I then wrote a program in the graphical programming software that utilizes every aspect of the hardware. You can click a button and start the line-following. The robot follows the line quickly, all the while updating the dials with current information about the distance to an object from the distance sensor, and the color of any object by the color sensor, the position of the claws, and the light output from the line sensors. Here is the robot:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.