 Blecky
BleckyBack from holidays, I decided to do some rudimentary verification that the RF design on the boards is actually correct (being closely related to the reference design, this should be somewhat in the ballpark). The 802.15.4 radios are currently set to channel 24 which sits on 2.480GHz.
Looking at the spectrum graph with a HackRF, we get the following:
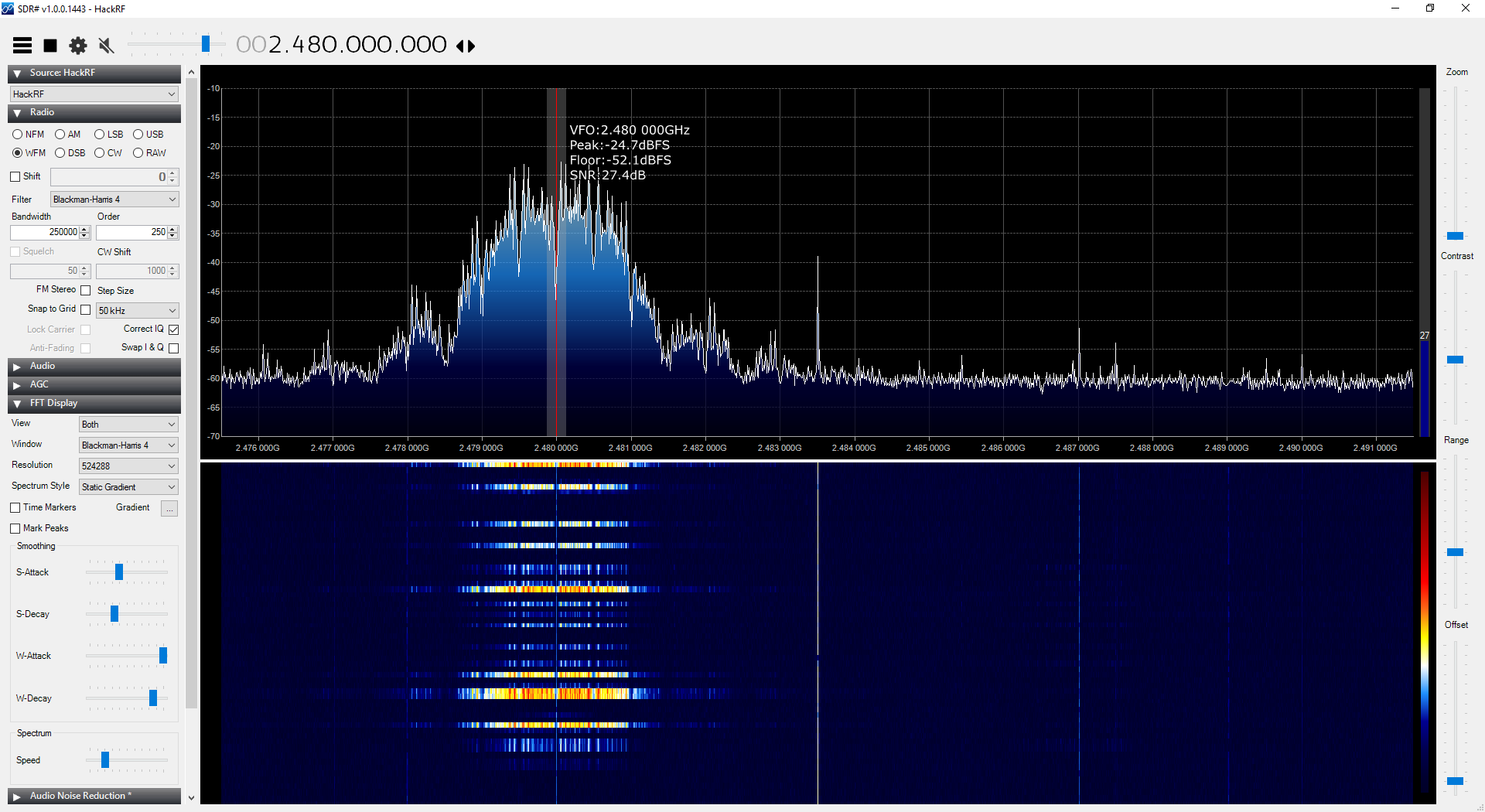
That's almost bang on. Further verification will be required, but at least it can be shown that there is nothing too funky going on with the current design.
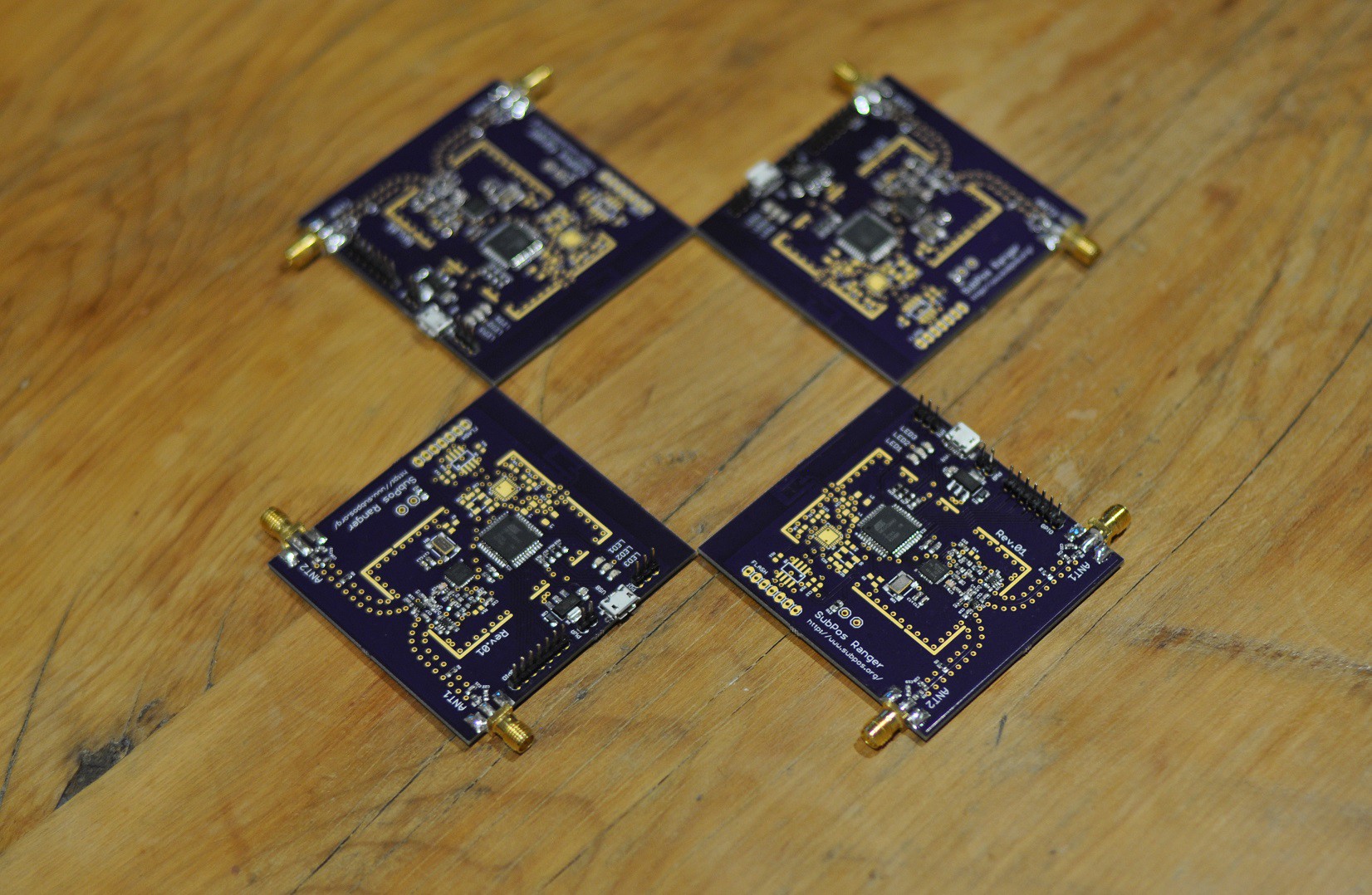
In addition, here is a glamour shot of all the boards made up:
I have also developed the code on the receiver to work with the SubPos standard (get the nodes and position, then perform ranging as per the flowchart in this post), so things are coming together. I just have to optimise it to work with multiple Rangers at once as there are some speed and ranging issues. Once that is done there will be a big demo update.
Edit:
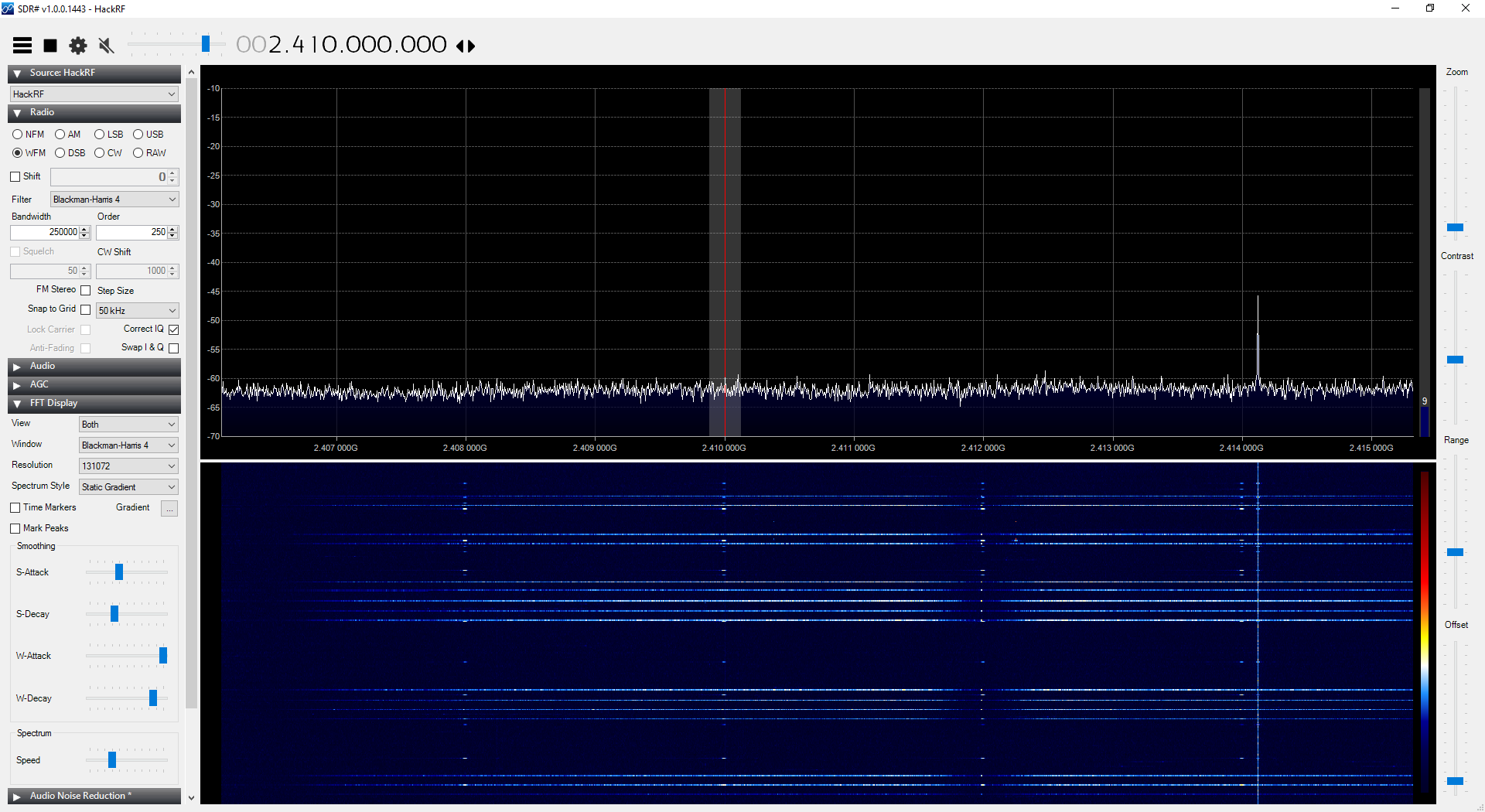
As a bonus, here is the spectral plot of the AT86RF233 phase measurements that the default Atmel ranging libraries are performing (the main method in which it performs its distance calculations; I am currently working on altering this ranging method). The ranger is set to span these measurements from 2408Mhz to 2414Mhz with 2MHz intervals. You can see these quite clearly:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.