 JLAM
JLAMThe pendulum design was getting quite troublesome with need to balance the multiple motors, so I've decided to try creating individual modules that can maintain a constant height. Then hopefully by joining multiple modules I should have a flying object.
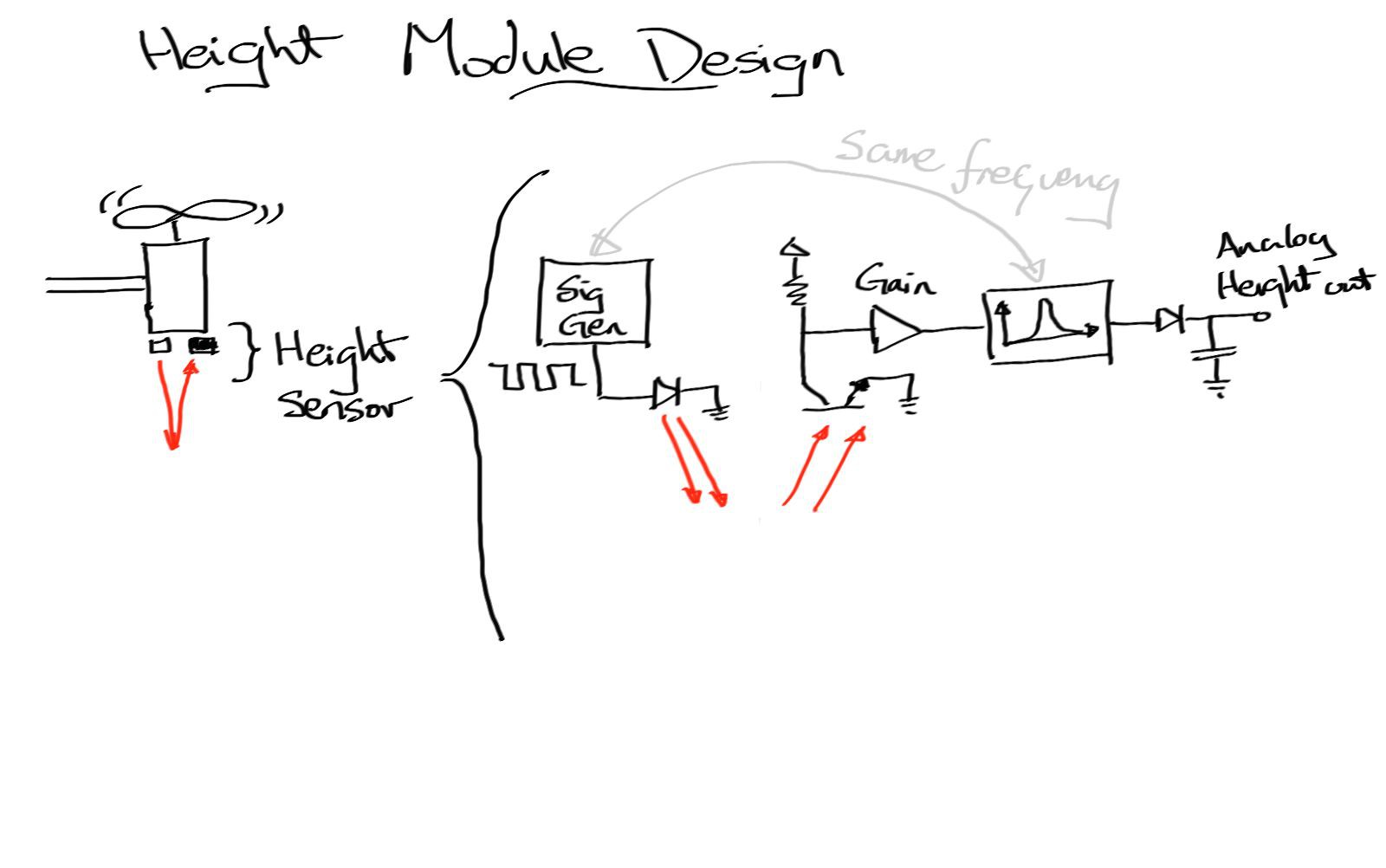
The module will use light reflectance to determine height as it is the smallest method I can think of. It will use an arbitrary frequency to drive an LED which is then sensed by a photo-transistor and passed through a bandpass filter to help reduce the effect of ambient light. This should provided the feedback signal to control the motor driver.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.