 Dan Royer
Dan Royer
Here's a close up of the gearing in the wrist. Everything here works in theory, but needs to be proven in reality. I tried printing some of these gears.
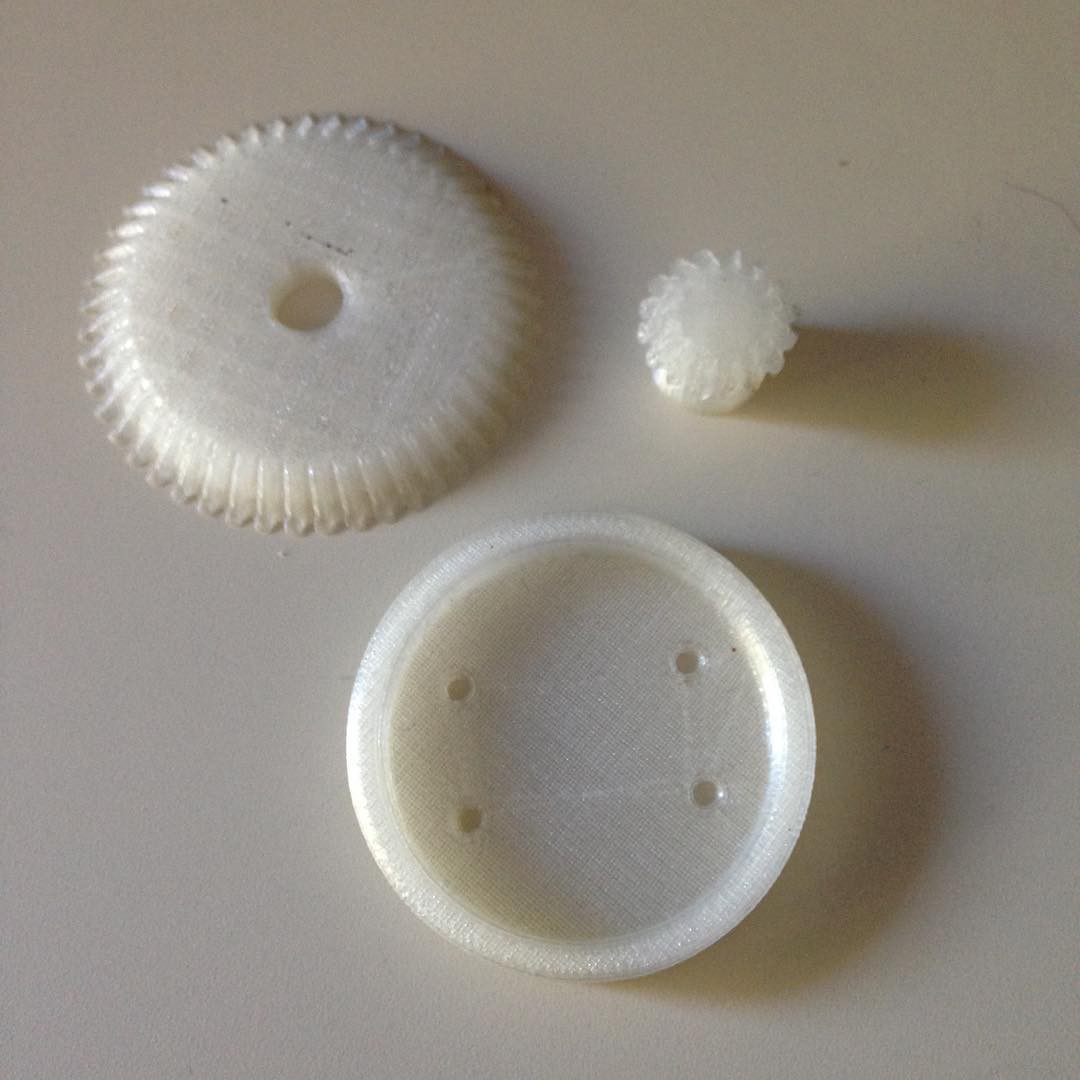
The cap on the bottom is a test fit for the rotation sensors.
Turns out these gears don't mesh correctly. Add that to the big list of "thing I find out a little too late". A line along the edge of each gear should all meet at a common point.
I tried to re-engineer the gears and got this:

Although they all meet at a point...there are big gaps in the teeth. I'm doing it wrong.
Can you help me get the right gears? I'm completely lost when I look at SDP/SI's gear page.
The larger gear is 48mm pitch and an 8mm hole. The smaller is 16mm pitch and a 5mm hole.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.