Using fins to stabilize a rocket gives superior performance to small model rockets than moving the engine (Gimbal Method). Using fin stabilization allows control to be longer into the cruising portion of the parabolic arc rather than the *short* propulsion of the rocket's launch. Rockets that are stabilized can prove to be a handy resource in the future as we use more sensors that could monitor many useful things.
0%
0%
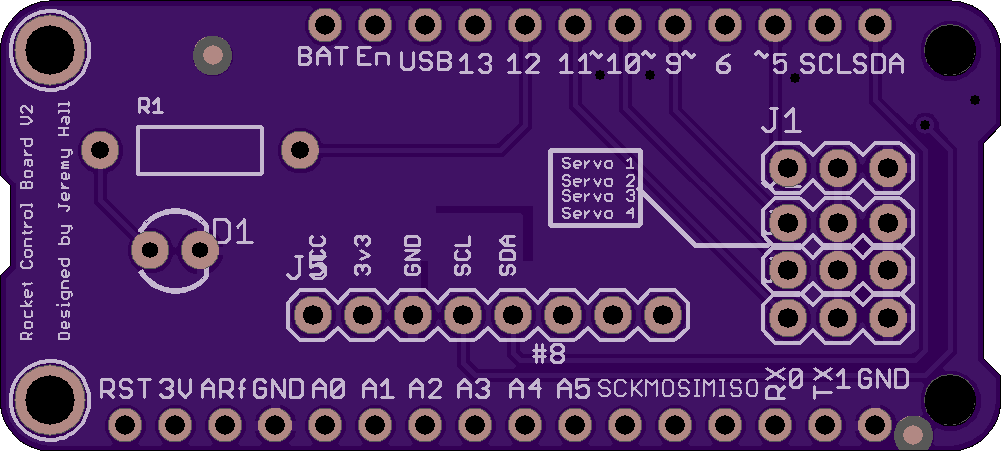
Active Stabilization Rocket System
Use control systems to control and stabilize a Amateur Rocket
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 The Big One
The Big One
 uri.shani
uri.shani
Jeb's Finally Going To Mun!