 rlsutton1
rlsutton1My robot is getting a serious upgrade.
Why? I decided that I couldn’t effectively avoid obstacles that the LIDAR couldn’t see using the Astra depth camera because it’s minimum point could range is 60cm.
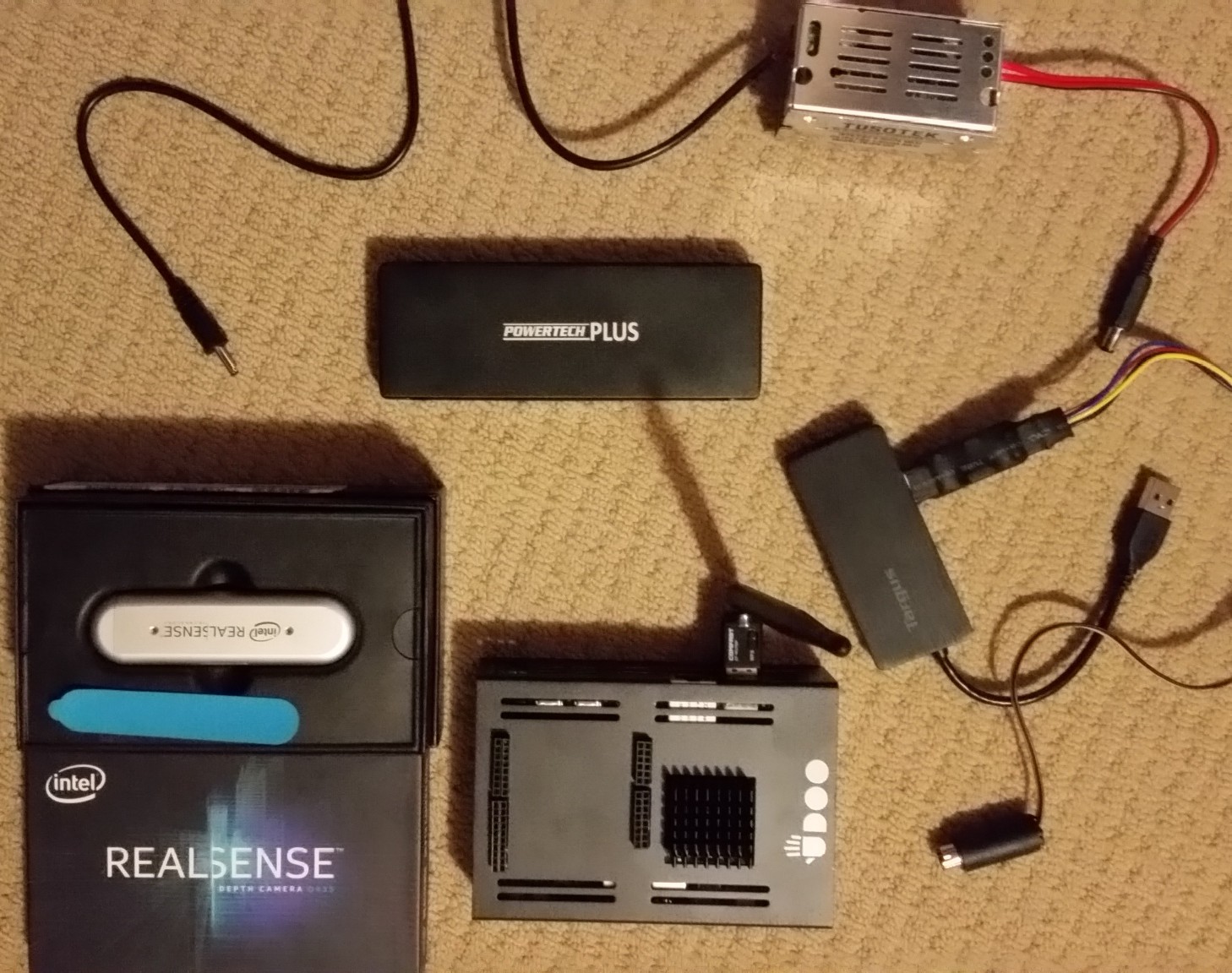
This then caused me to find a depth camera with a shorter minimum range and I found the Intel Realsense D435. The D435 has a minimum depth range of 10cm at lower resolutions and 20cm at higher resolutions.

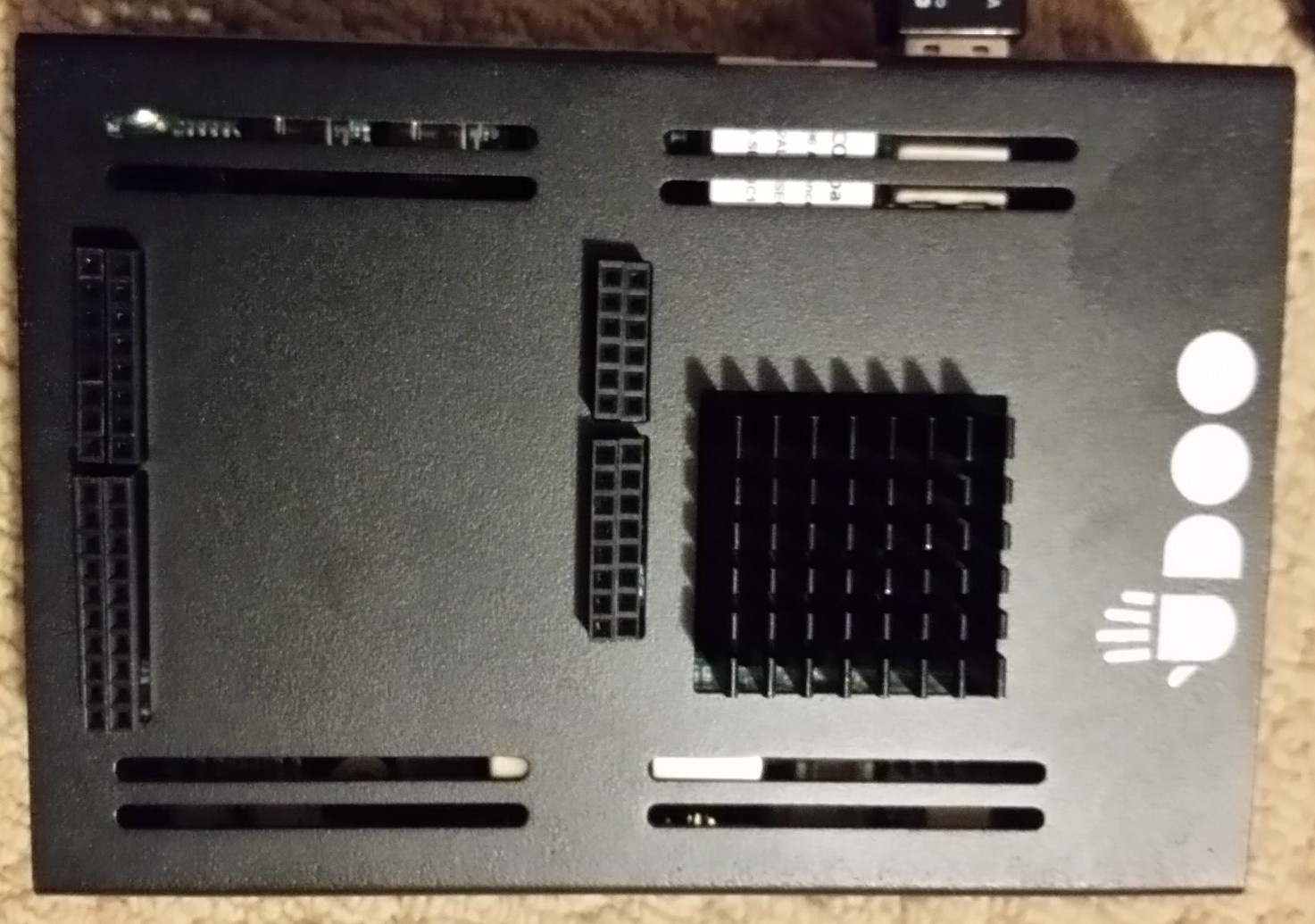
This led me to the next problem, the Realsense camera requires USB3 and the SDK doesn’t have ARM support either, making the Raspberry PI a problem. This led me to search for a replacement processor that supports USB3 and is X86… and the winner is UDOO X86.
The UDOO requires 12V at up to 3 Amps, I bought a 12Volt battery power bank…

I soon realised that the power bank could operate at 12,16 or 19 volts and as it only has a single button to turn it on, off and select the voltage, it would be possible to accidentally select a higher voltage when turning it off. This was an unacceptable risk as the UDOO requires 12V +- 5%, which led to the next search – for a 12 Volt buck/boost regulator.

The next challenge was a shortage of USB ports I need 4, but the UDOO only has 3 although this was an easy one to solve.
Given that all my code is written in Java, the move from Raspberry PI to UDOO X86 is effortless for my code. But the Realsense D435 depth camera doesn’t have much in the way of Java support and I had already sunk some effort into integrating with OpenNI2 for the Astra camera. The Realsense libs do support OpenNI2 – this sounded like an easy fix, but as it turns out it requires manually building the OpenNI2 & Realsense SDK. I cheated a little and used the binaries for the OpenNI2 build, which caused me some other problems but after about 3 or 4 hours and a firmware update for the Realsense, it was working.
The next problem is how to house all this new hardware
I’m building a new platform for the hardware to sit on top of the Roomba. As the Realsense is much smaller I’ll be able to condense it into just 2 layers. I started with a couple of MDF cake bases from the local bargain shop. I added a slot into the lower one to allow access to the Roomba’s buttons. I’ve also used some cupboard handles to act as stand offs to hold the platform above the Roomba with enough clearance for the Roomba Serial din plug, I didn’t want to bring the din plug though the platform to allow more clear space for all the hardware to sit on the bottom platform.
To be continued…
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.