 cb22
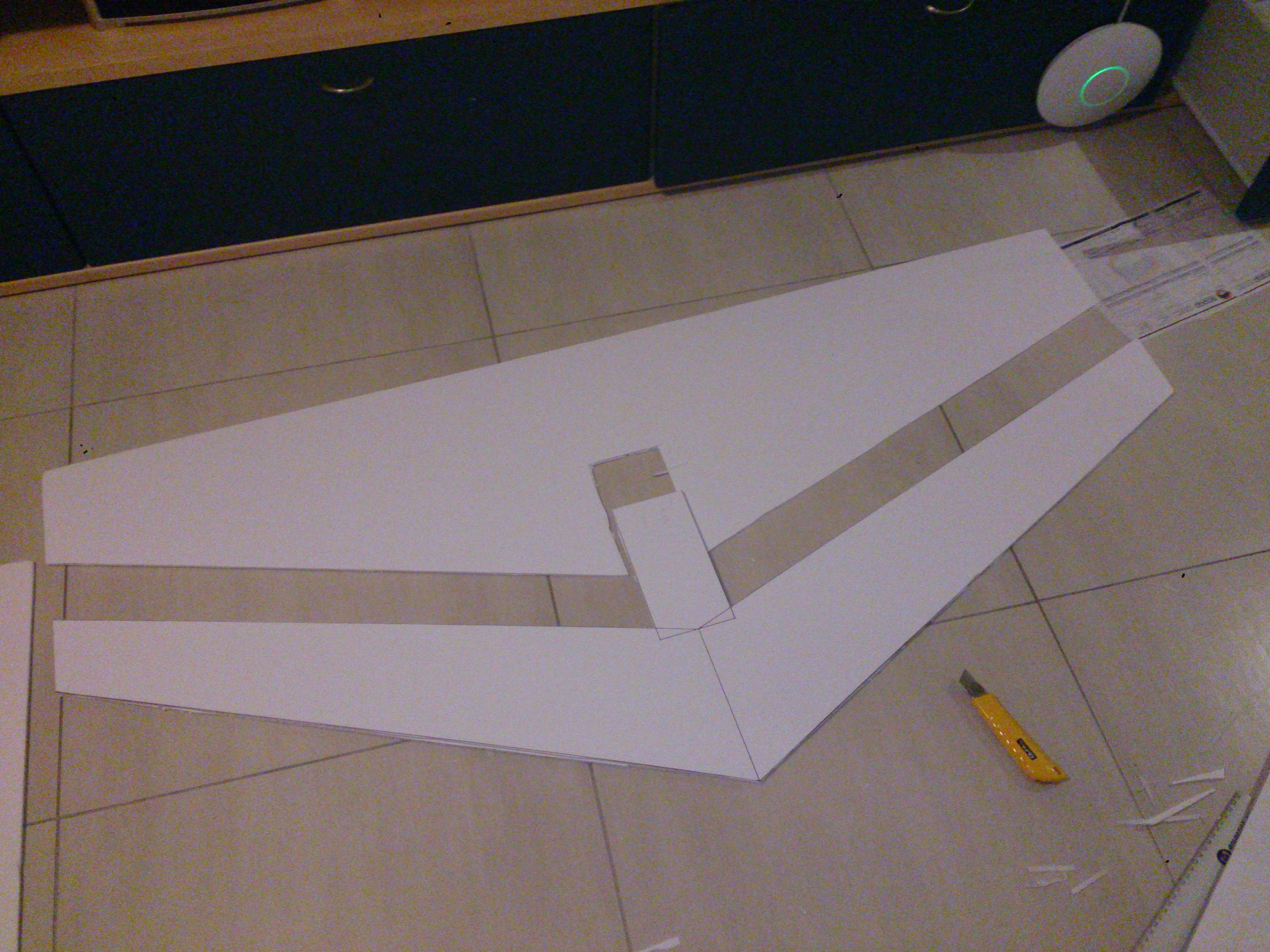
cb22The main idea behind this project is to use low cost RC aircraft as a platform for building a distributed wireless mesh network. The current idea is to use a 5GHz wireless link for inter-drone communication, with 2.4GHz panel antennas aimed downwards to provide ground coverage.
Each plane should have the capacity to stay in the air for at least an hour, but since multiple planes can form a swarm, they should be able to keep coverage while others are recharged or taken down.


 Flying environments tend to be a bit inconducive towards breadboards, unfortunately.
Flying environments tend to be a bit inconducive towards breadboards, unfortunately.








 Ryan Spicer
Ryan Spicer
 koswix
koswix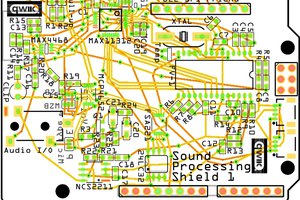
 bobgreenwade
bobgreenwade
https://en.wikipedia.org/wiki/Prey_(novel)