 Alvaro Villoslada
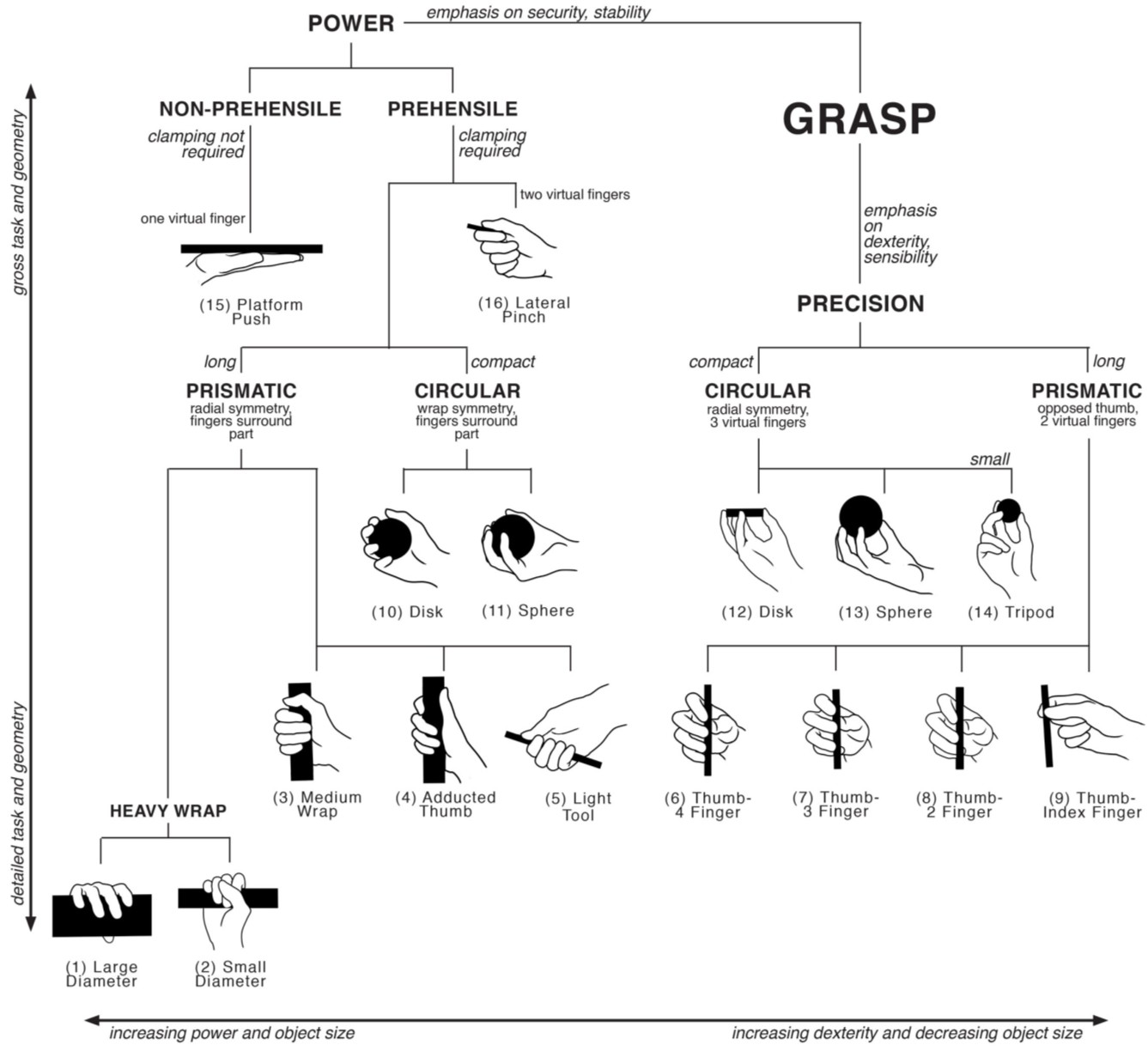
Alvaro VillosladaWhen robotic hand designers want to evaluate the dexterity of their latest design, the most common method is to try to reproduce as many grasps as possible from the Cutkosky grasp taxonomy. Mark Cutkosky wrote a paper in 1989 where he classified a set of manufacturing grasps in order to evaluate analytical models of grasping and manipulation with robotic hands. Since then, this taxonomy has been widely used to test the dexterity of robotic hands, to the point of becoming one of the basic benchmarks for these devices. This is the hierarchical tree of grasps:
In the next image, this hierarchical tree is reproduced with images of Dextra performing the same grasps identified by Cutkosky:
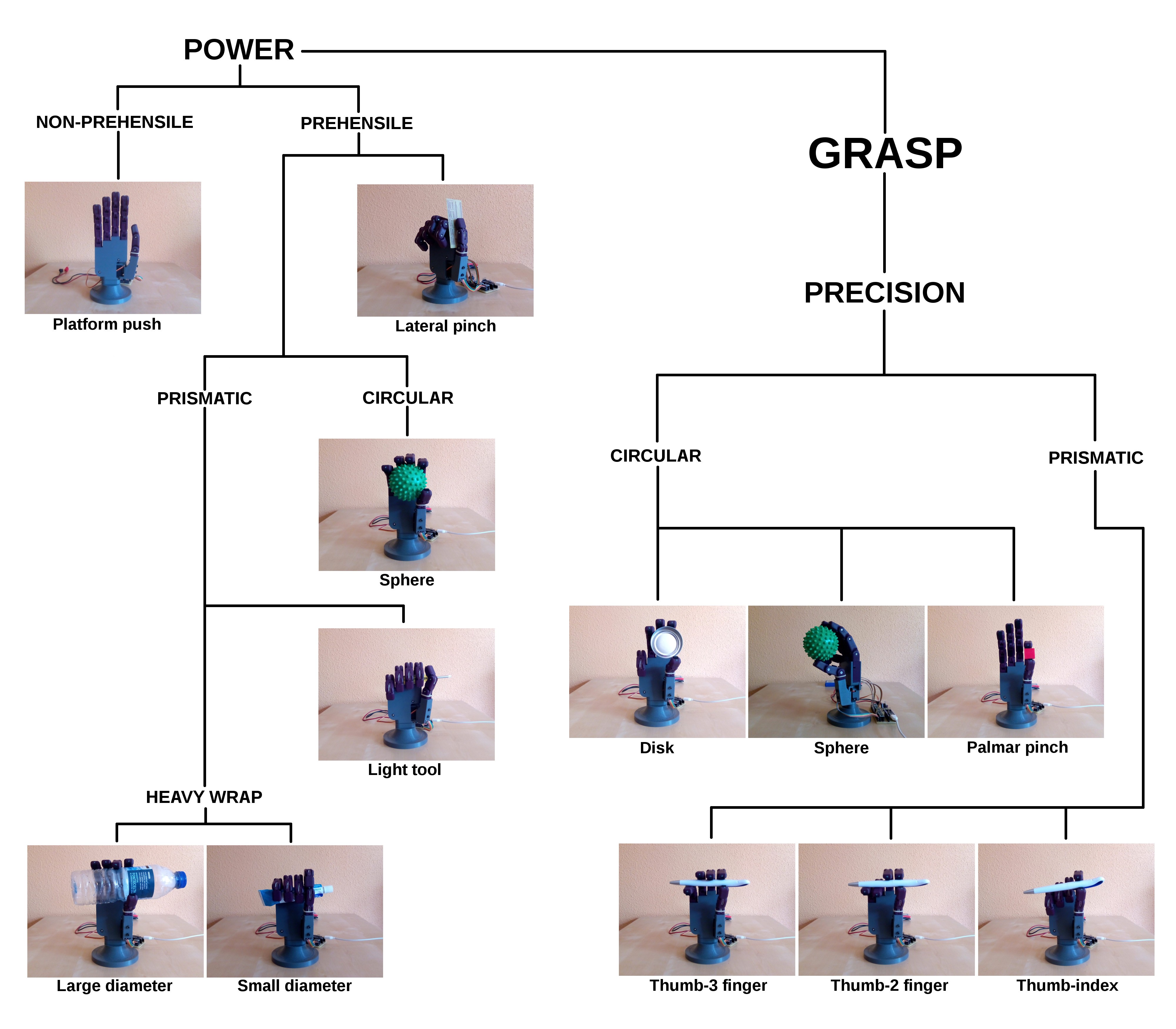
As can be seen, Dextra is able to reproduce 12 of the 16 Cutkosky grasps. To put this in perspective, the Robonaut 2 hand is able to reproduce 15 of the 16 grasps. I think it is not bad at all that a robotic hand that can be built at home is able to perform just 3 grasps less than a robotic hand designed by NASA.
The robotic hand is also able to reproduce some grasps that are not present in the original grasp taxonomy. Cutkosky admits in his paper that the taxonomy is incomplete, because there are grasps, that he considers as "children", or combinations, of the classified grasps, that are not included. One of these children grasps is the one we use to write with a pencil. In view of the great obtained results, why not test whether Dextra is also able to perform this kind of grasp?
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.