 TK
TKI've been into electric scooters for a long time. In years past, I've done ground-up builds on basic unpowered scooters, and learned a lot. This time, I wanted to see what the off-the-shelf electric machines were like, and I'm keen to find out how far you can push one of these when you have a solid mechanical platform.

They're fun enough, but they're not exactly blazing fast. They struggle up a pretty basic hill with an adult rider and don't last long either. Worst of all, they take a full 12 hours to charge. Yep - all of these failings come down to one thing. The lead acid batteries. Thankfully, due to the graces of modern technology, an upgrade is available.

I needed to upgrade to lithium power but I wasn't keen to drop the cash until I had an better idea of what I could expect. Instead of buying new batteries and a speed controller, I decided to work with what I had. The stock speed controller and the two 18V 1.4Ah Ryobi lithium drill batteries I had already. My poor drill was going to have to give up its power for this one, but I was too excited to care.
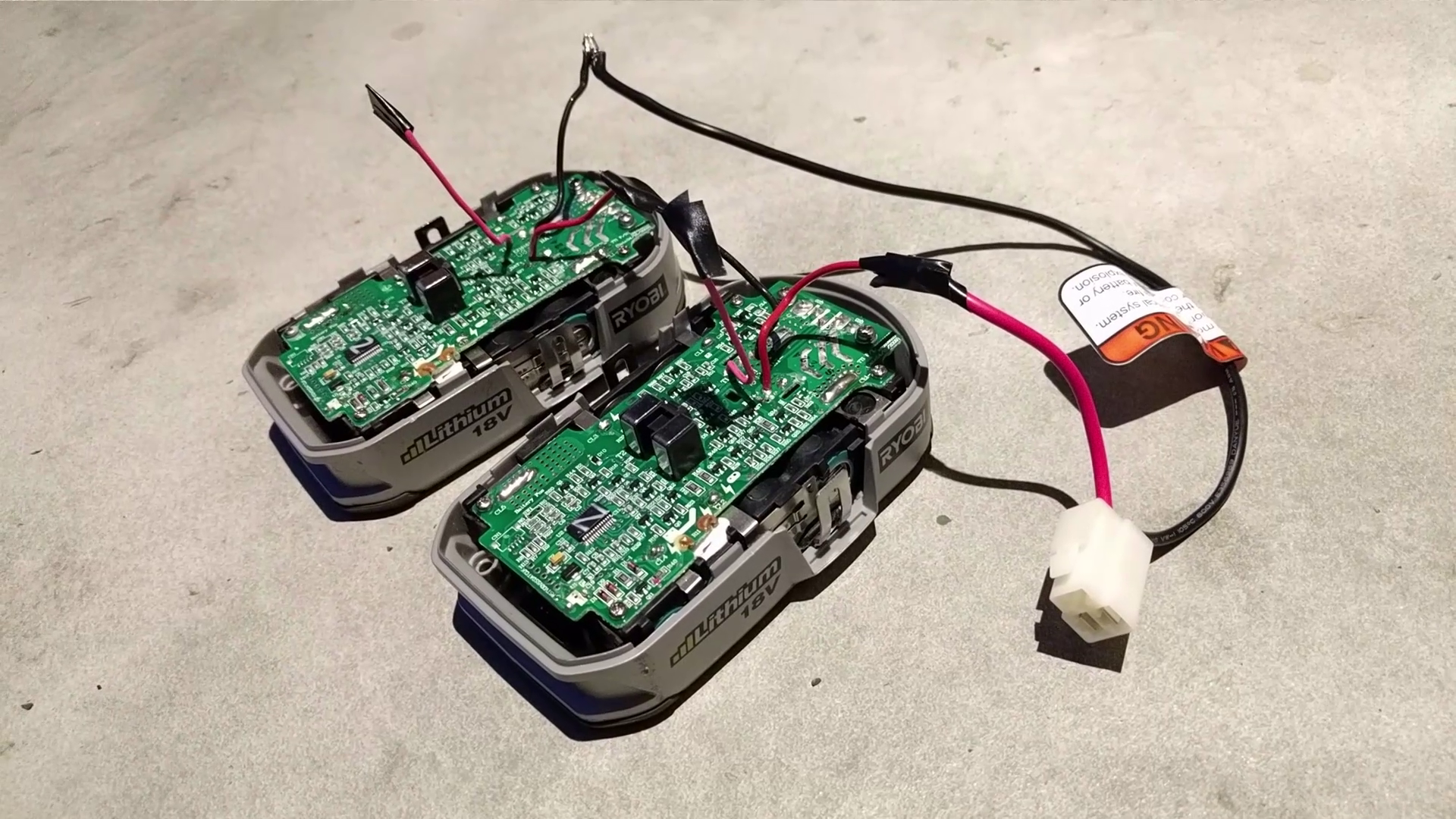
Using the connector from the stock batteries, I wired the Ryobi batteries in series to make a 36V pack. I plugged everything in but initially, nothing happened! A bit of a twitch but no drive. I could hear a relay clicking every time I hit the throttle though. I delved deeper.

After tearing down the stock speed controller, I found the culprit. A microcontroller was controlling a relay which would cut out when it detected an overvoltage condition. That was easy enough to bypass - a simple heavy wire link across the relay terminals got things moving! But performance was still somewhat limited. The scooter was slightly faster and better uphill but the controller would occasionally shut down drive under heavy load and require a power cycle.
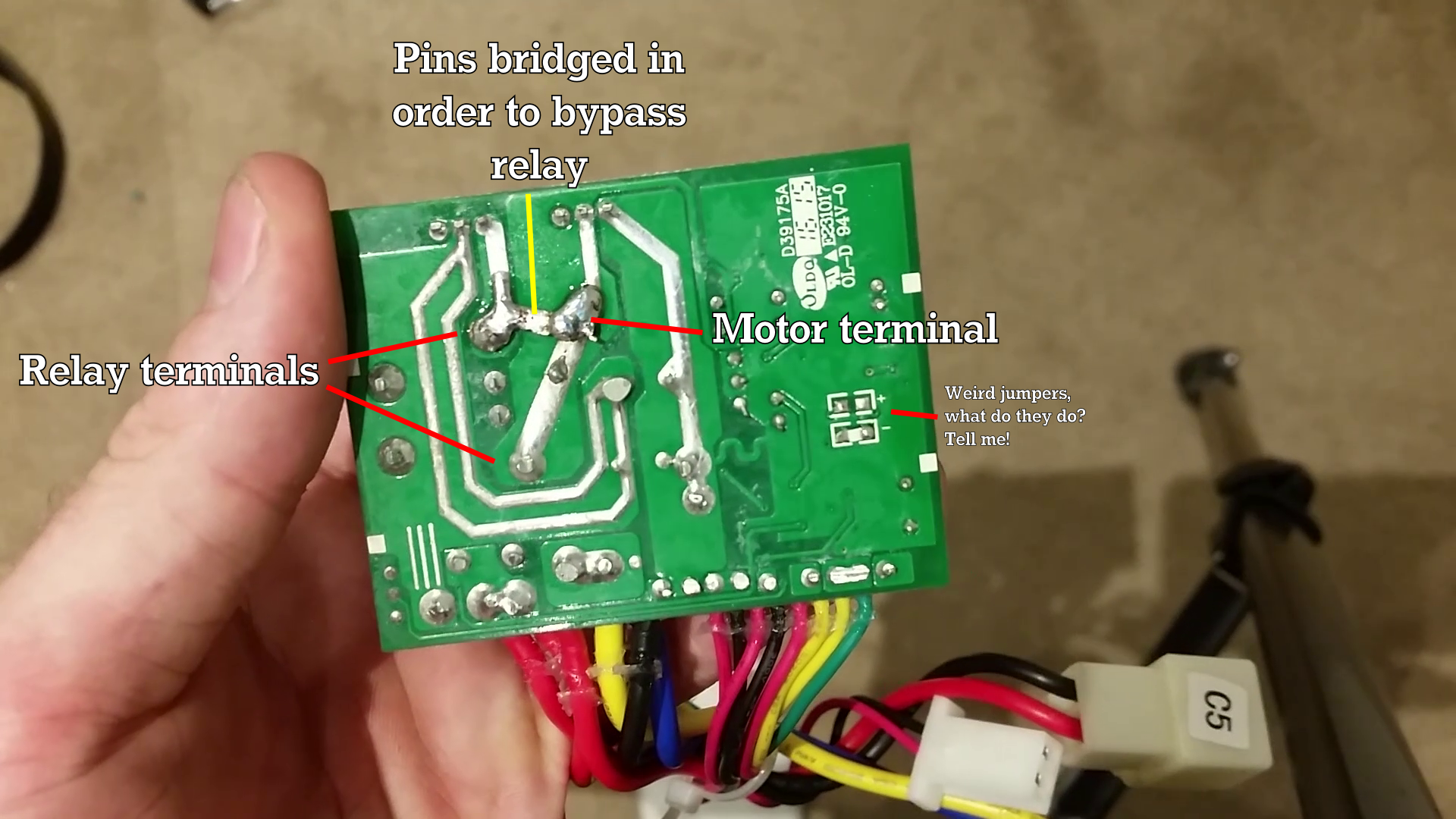 If you know what those weird jumpers do, PLEASE tell me! My curiosity is killing me. I should probably just trace where they go already.
If you know what those weird jumpers do, PLEASE tell me! My curiosity is killing me. I should probably just trace where they go already.
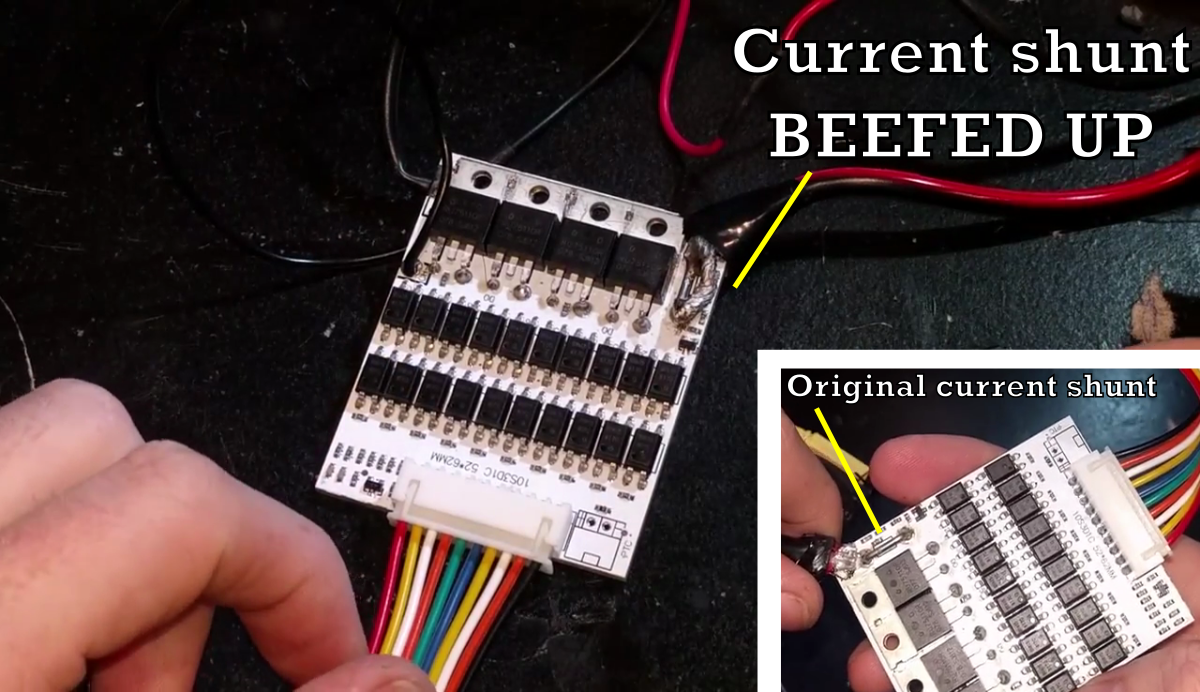
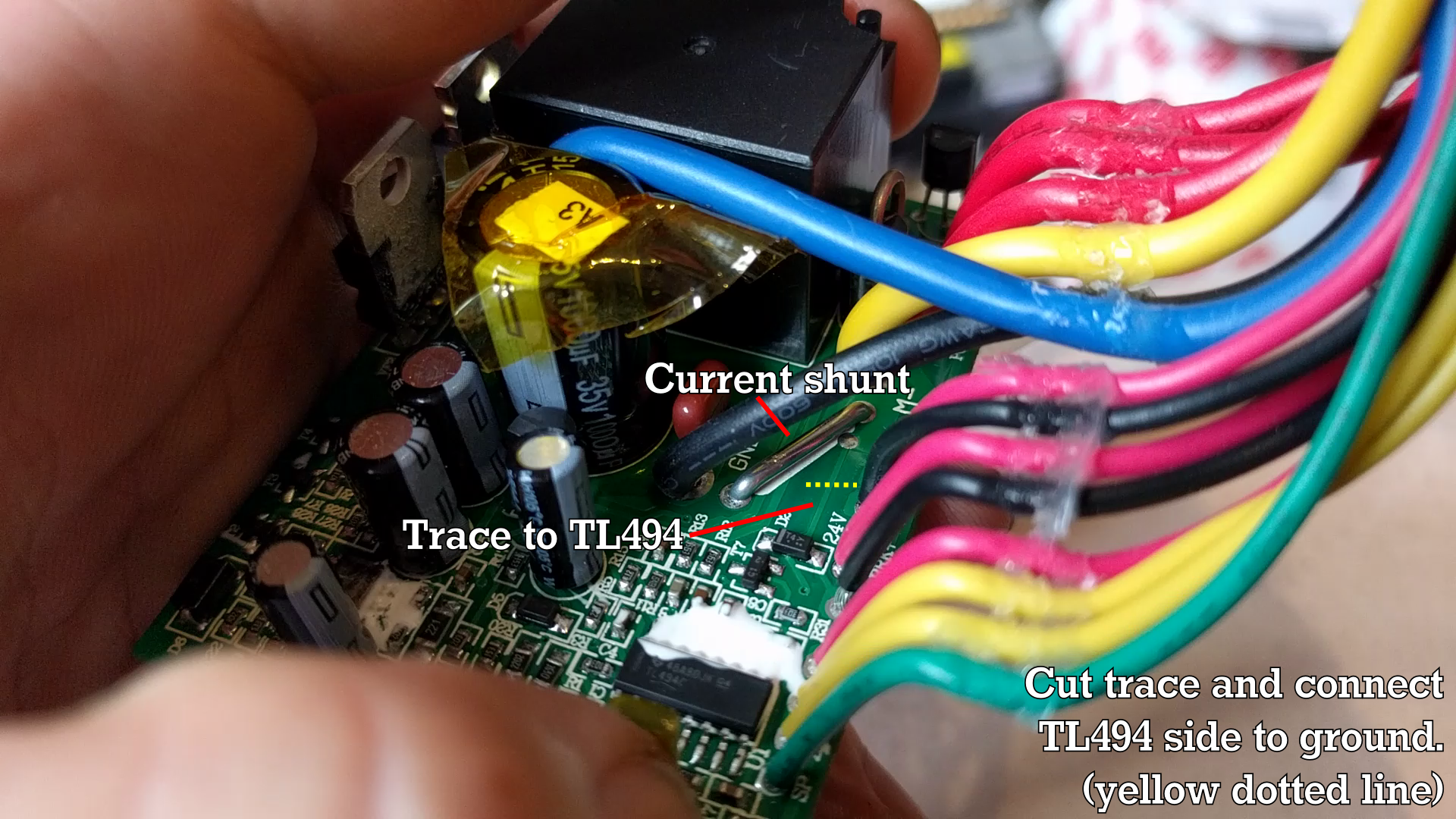 I was very lucky - the manufacturer hadn't ground the identification off any of the parts. There was some white goop but it came away easily enough. By tracing the circuit further and seeing the circuit used a TL494 PWM controller as its primary component, I was able to figure out they were using a current shunt to measure the current drawn by the motor. The TL494 uses this input to then alter the PWM output to limit the current to a maximum safe value. Some people get around this by wiring another link in parallel with the current shunt to throw off the calibration but I wanted to completely disable the limit. Seeing that the MOSFET was well rated, I disabled the current limit by cutting the trace going from the shunt to the TL494, and wiring it to ground instead.
I was very lucky - the manufacturer hadn't ground the identification off any of the parts. There was some white goop but it came away easily enough. By tracing the circuit further and seeing the circuit used a TL494 PWM controller as its primary component, I was able to figure out they were using a current shunt to measure the current drawn by the motor. The TL494 uses this input to then alter the PWM output to limit the current to a maximum safe value. Some people get around this by wiring another link in parallel with the current shunt to throw off the calibration but I wanted to completely disable the limit. Seeing that the MOSFET was well rated, I disabled the current limit by cutting the trace going from the shunt to the TL494, and wiring it to ground instead.
 Riding it like this is twice as dangerous, and twice as fun, too.
Riding it like this is twice as dangerous, and twice as fun, too.
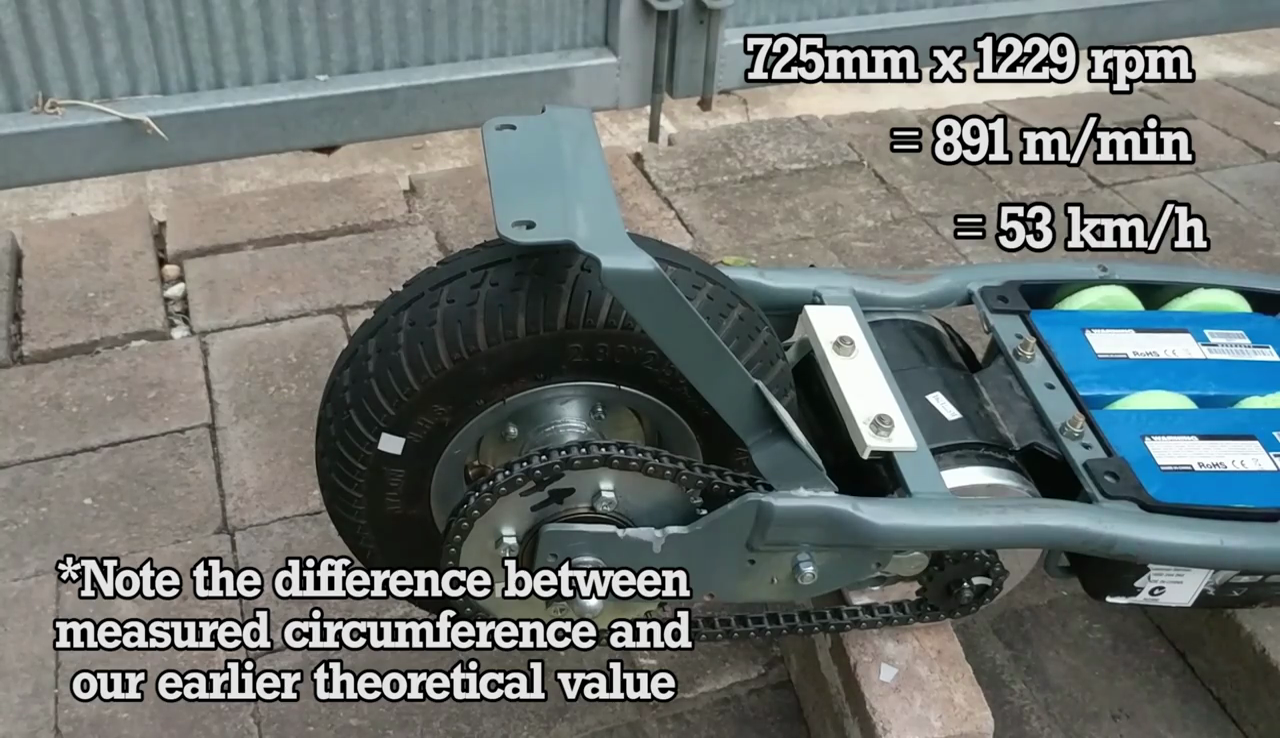
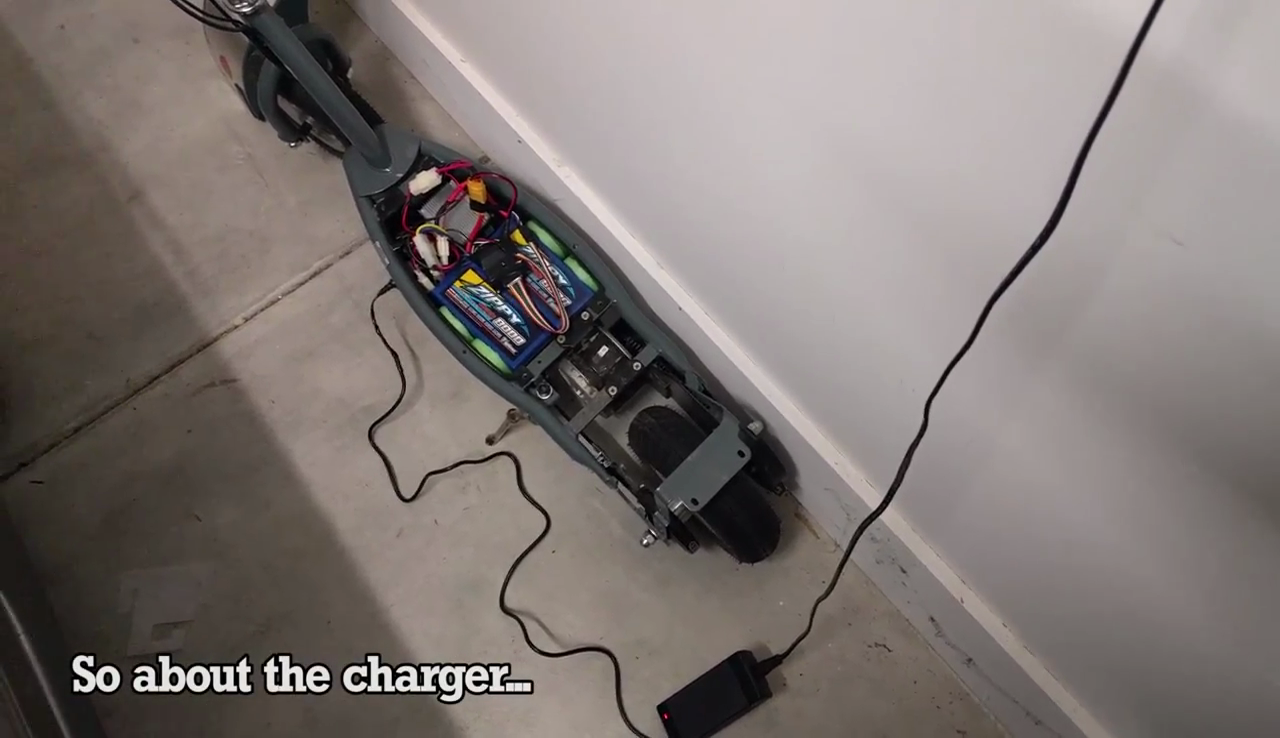
Once the current limit was off, performance was greatly improved, particularly uphill. Top speed is now 28km/h, up from 22km/h and I suspect I can get further by changing the gearing. I can't wait to install a proper set of hardcore LiPos and do more mods! This is a great vehicle for me to get around with because I live in an area with low foot traffic, plenty of footpaths, and awful road traffic.
Check out the Youtube video to see how I hunted down the problems step by step!




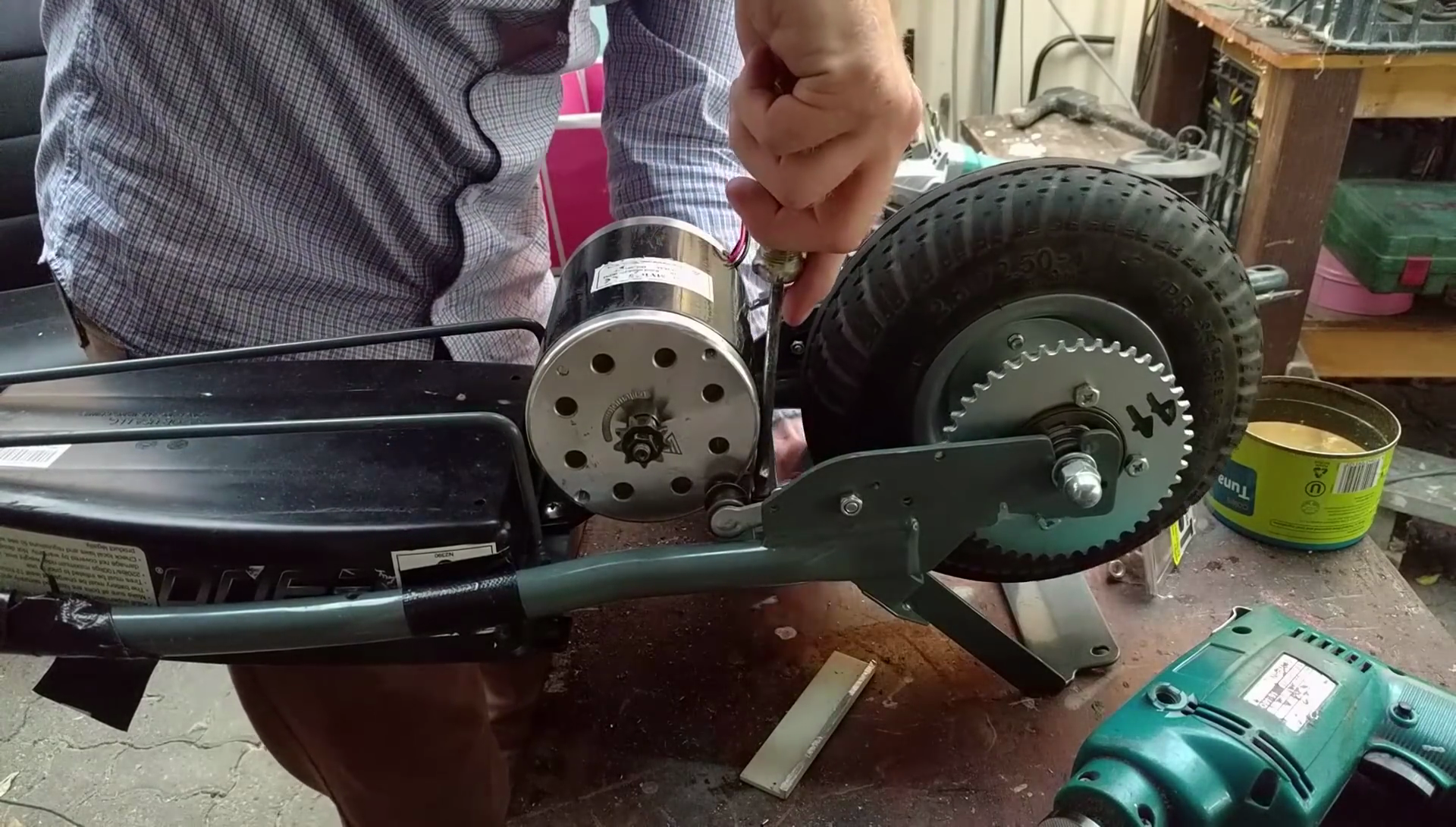
 Next up was the brakes. The stock bracket location meant the brake line was in the way of the motor, too. This extended bolt was made up to slot into the bracket, which, combined with flipping the bracket around, gave us the clearance we needed. Incidentally, we'd needed to shorten the sliding tube a little. The cordless-drill-come-lathe was the way to do it.
Next up was the brakes. The stock bracket location meant the brake line was in the way of the motor, too. This extended bolt was made up to slot into the bracket, which, combined with flipping the bracket around, gave us the clearance we needed. Incidentally, we'd needed to shorten the sliding tube a little. The cordless-drill-come-lathe was the way to do it. Pictured: Cordless drill in lathe's clothing
Pictured: Cordless drill in lathe's clothing
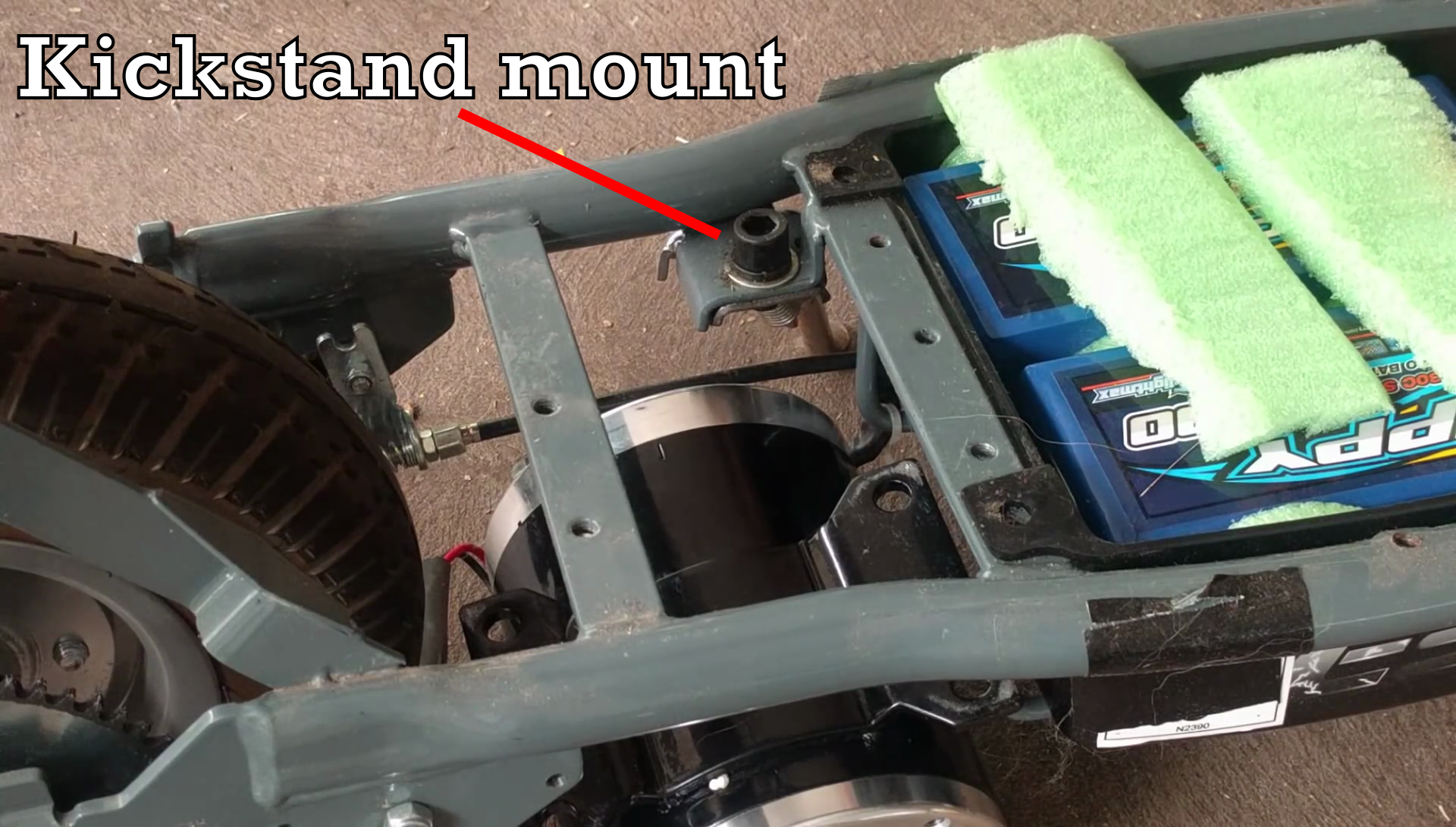
 Bolting up the motor to the frame. Clamping bracket not easily visible. Note the 44-tooth T8F sprocket fitted to the rear wheel.
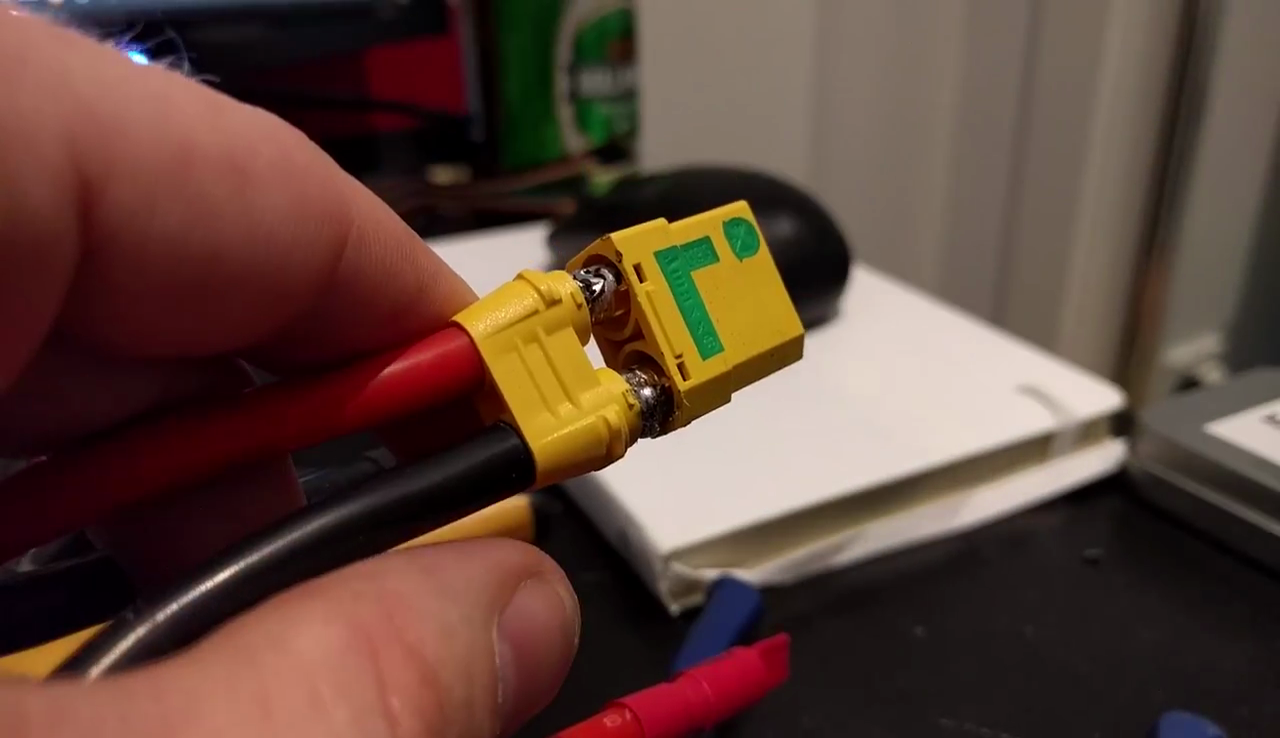
Bolting up the motor to the frame. Clamping bracket not easily visible. Note the 44-tooth T8F sprocket fitted to the rear wheel.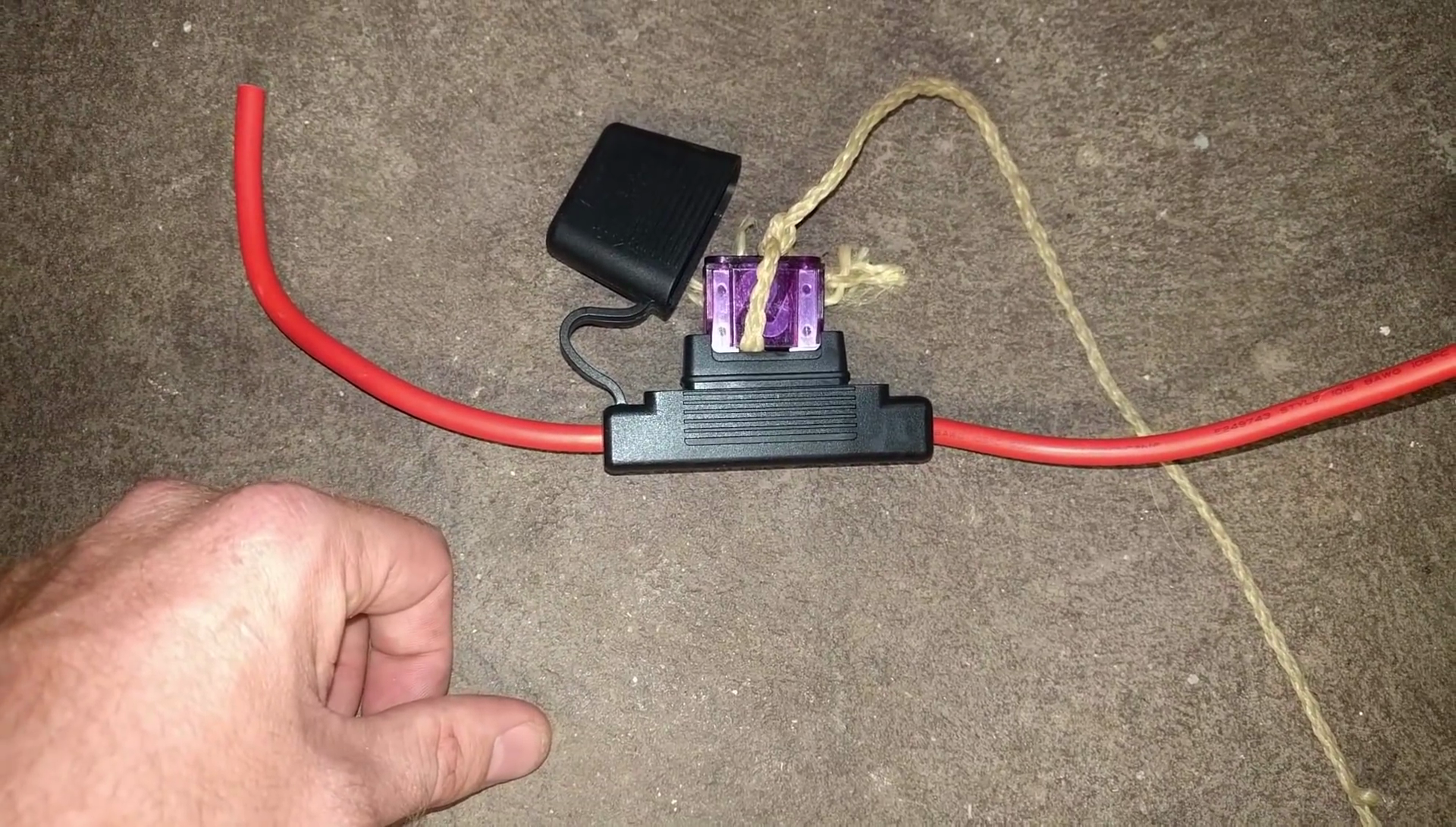 The fuseholder with fuse & YISHF (yank-if-shit-hits-fan) string....
The fuseholder with fuse & YISHF (yank-if-shit-hits-fan) string....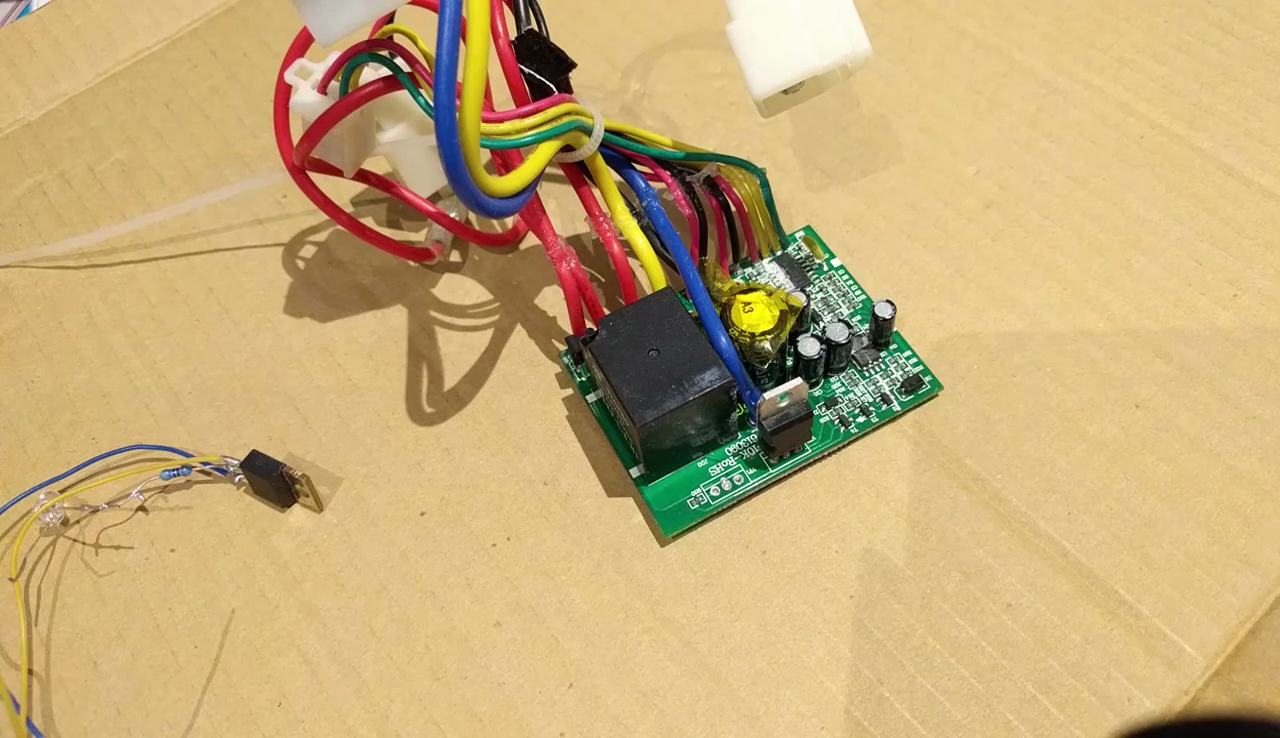

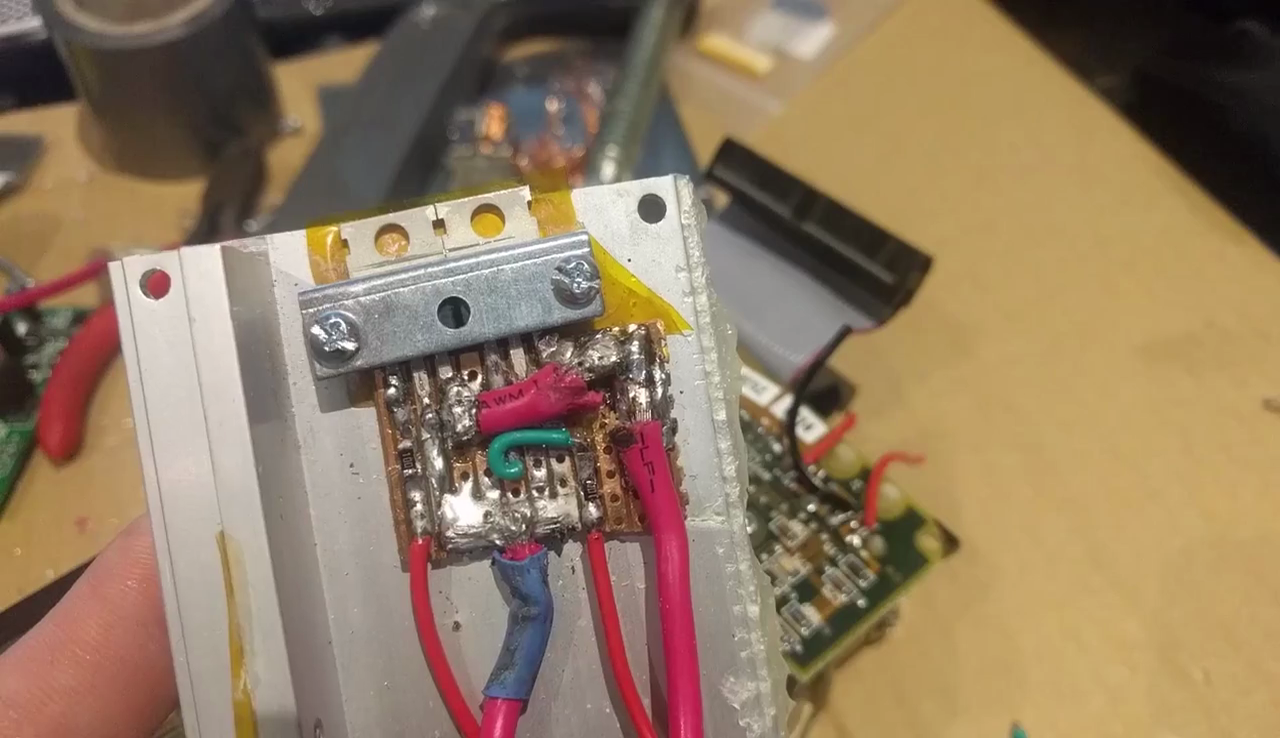
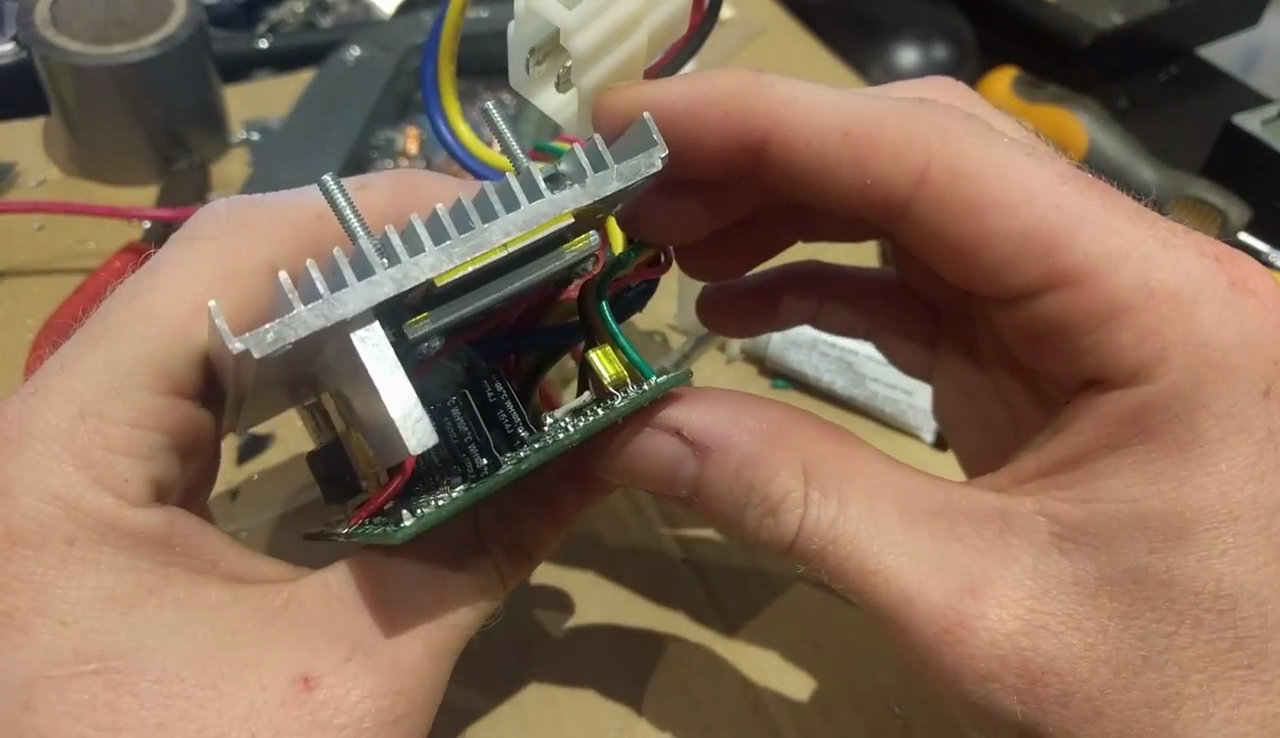 Reassembling the speed controller. The new FETs are a good fit and make excellent contact with the heatsink.
Reassembling the speed controller. The new FETs are a good fit and make excellent contact with the heatsink.

 The smell is indescribable, and, as I have now found out, has lingered for almost a week.
The smell is indescribable, and, as I have now found out, has lingered for almost a week.

 Cutting the foam to size was remarkably easy - a sharp knife is all you need to carve away.
Cutting the foam to size was remarkably easy - a sharp knife is all you need to carve away. 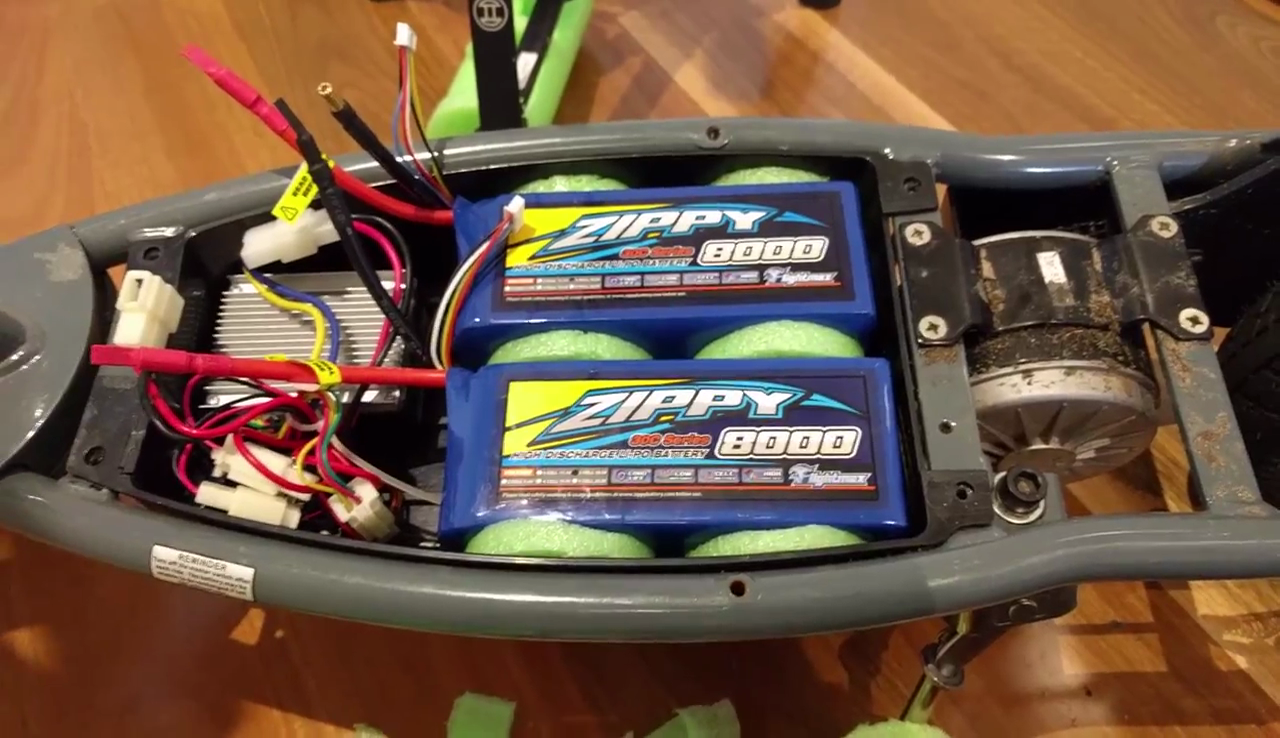 I was stoked with how neat this turned out. The batteries are held in place really well - highly recommended! Next up it was time to do the wiring for the BMS.
I was stoked with how neat this turned out. The batteries are held in place really well - highly recommended! Next up it was time to do the wiring for the BMS.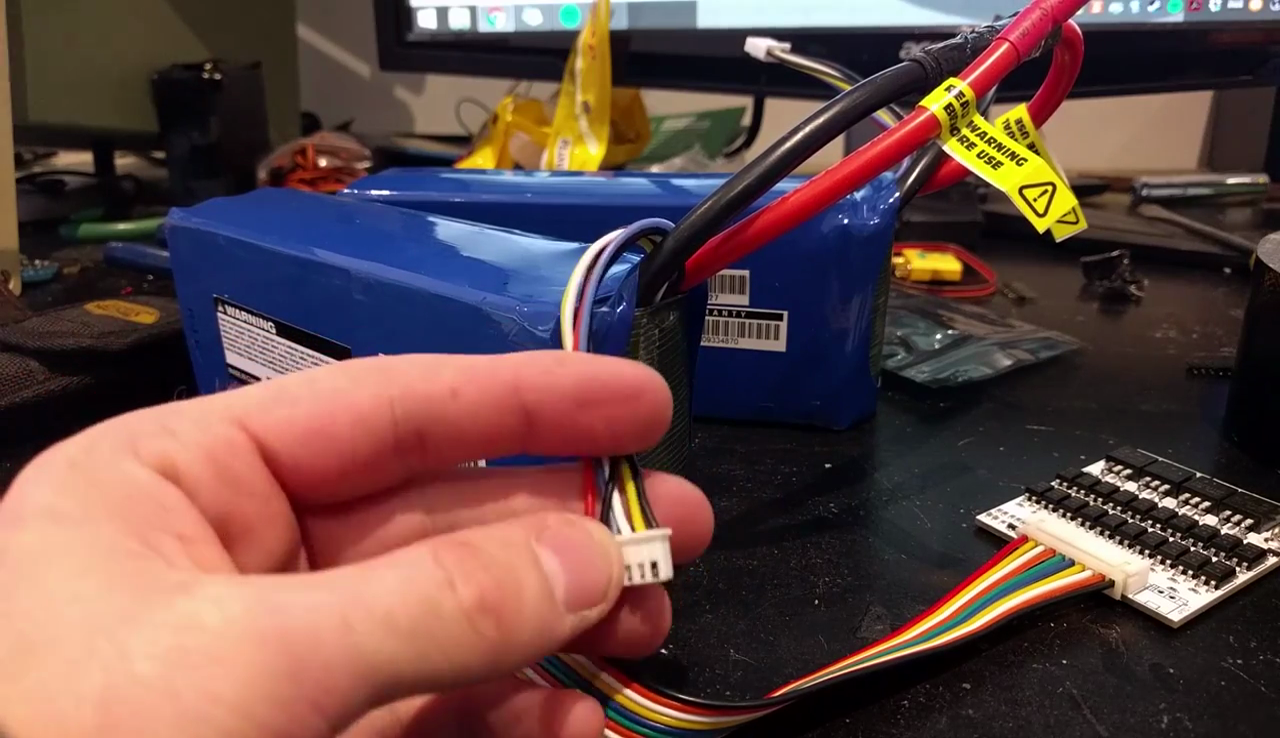







hey man. Can I chat with you about a separate project???
It’s similar but it has a Bluetooth circuit board for the on off switch. And it has the eprime hub motor. And the eco smart battery. It’s crazy. I need to bypass so much though. I need help!