 Thomas
ThomasGUI explanation etc
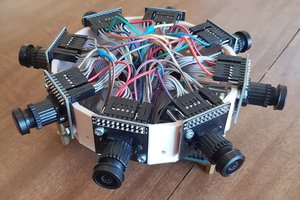
The Software is written in C#. I use a PSoC5 and some other controllers to establish a USB-UART connection to the crane/servos.
As the Oculus Rift is distorting the image I also had to distort it to compensate it. It would use way to many resources to do that on the CPU. Therefore I implemented a pixel-shader to distort the images on the GPU.
 Joseph Eoff
Joseph Eoff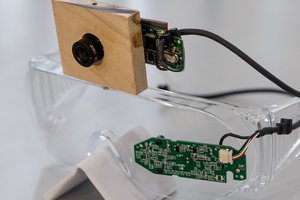
 John Evans
John Evans
 Sergej Stoetzer
Sergej Stoetzer