Of all of my projects, this one is definitely the oldest. I started working on my first ROV in October 2012, back when I knew very little about electronics and nothing about programming. I was motivated by the challenge - designing an ROV is no simple task - and by the potential for discovery that it offered. This project started with the simple objective of building something, but it has grown since then to include a whole suite of vehicles, probes, and concepts.
The things I've learned from building ROVs have helped me with almost every other project I've worked on. Whether it's an electronics skills, programming technique, or project management structure, I can often trace its origins back to this project. I haven't yet built a properly useful ROV, but each iteration of this project teaches me something new for the next attempt. Every failed test flight has taught me something valuable and, because of this, every test flight lasts a little longer than the one before it. So, with that, lets meet the iterations of failed ROVs.
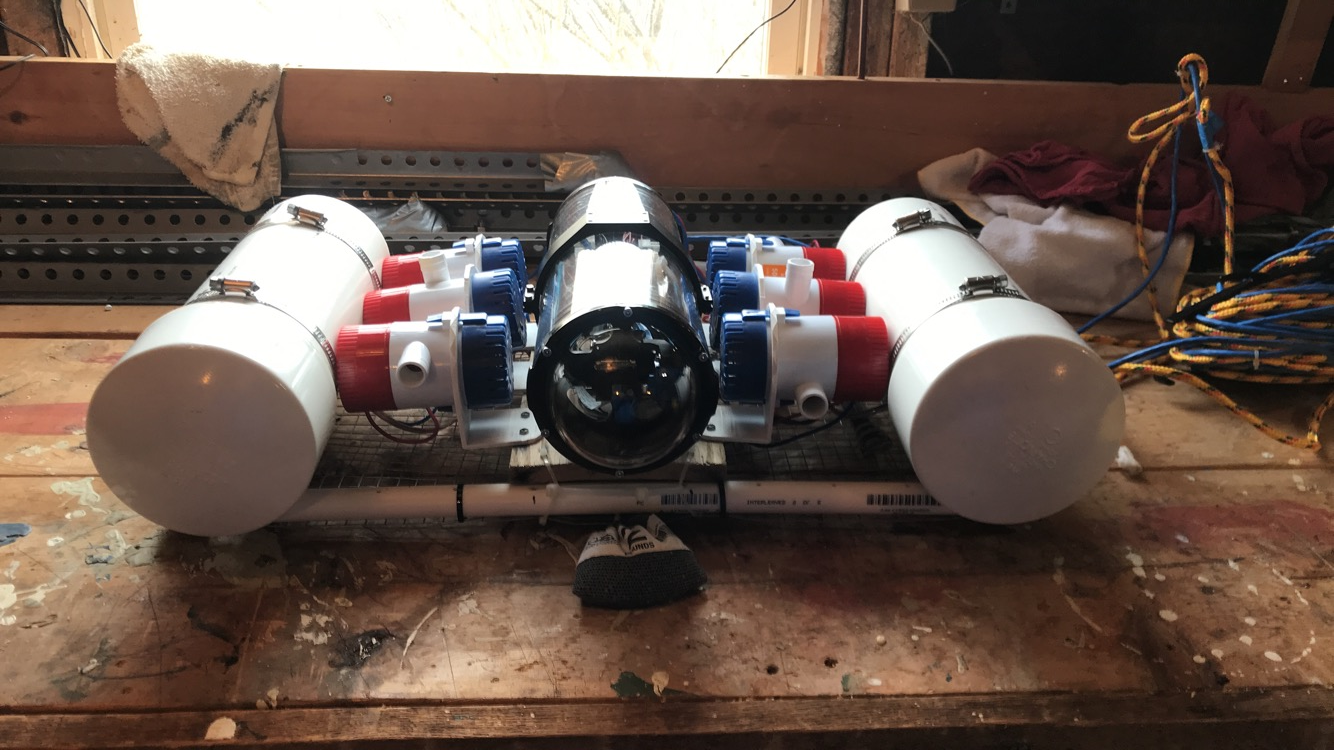
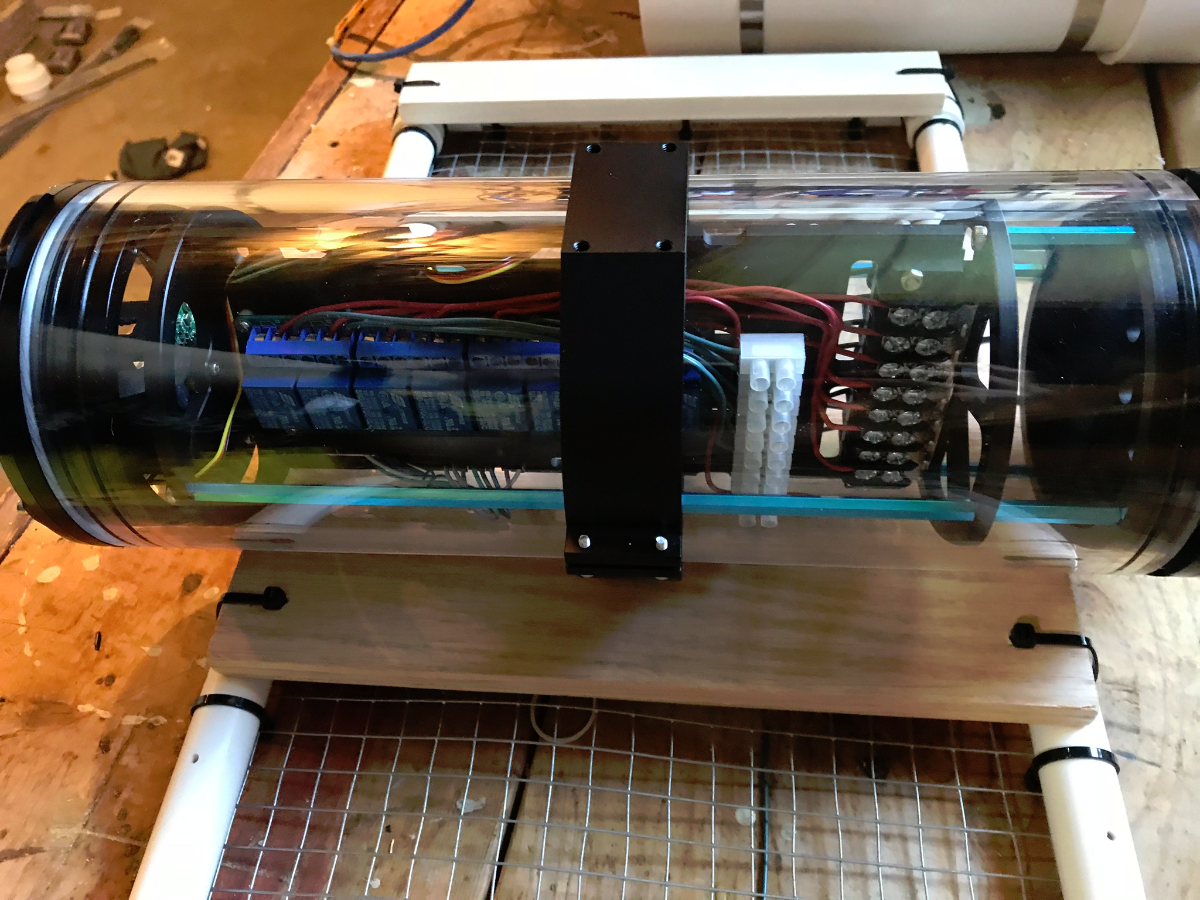 This was also the first ROV to use 3D printed parts and Blue Robotics parts. I realized that, after Version 0, I would need to get some proper ROV hardware, so I purchased an enclosure and electronics tray from Blue Robotics. This enclosure made a world of difference - there was still the occasional leak, but it was so much more reliable. The electronics tray also made it so much easier to maintain the vehicle - gone were the days of haphazardly stuffing electronics into a PVC tube. As the for the 3D-printed parts, I realized that I would need some better hardware moving forwards, so I got my printer into gear creating thruster brackets.
This was also the first ROV to use 3D printed parts and Blue Robotics parts. I realized that, after Version 0, I would need to get some proper ROV hardware, so I purchased an enclosure and electronics tray from Blue Robotics. This enclosure made a world of difference - there was still the occasional leak, but it was so much more reliable. The electronics tray also made it so much easier to maintain the vehicle - gone were the days of haphazardly stuffing electronics into a PVC tube. As the for the 3D-printed parts, I realized that I would need some better hardware moving forwards, so I got my printer into gear creating thruster brackets.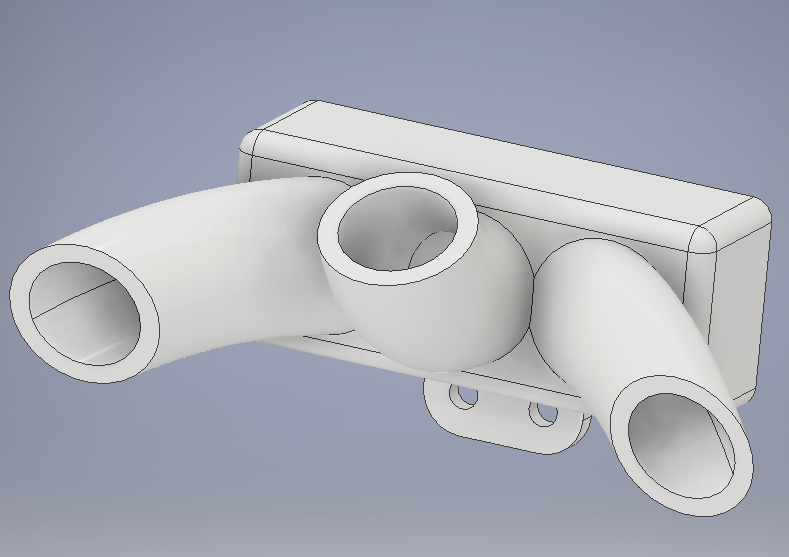 that would give me way more degrees of freedom and allow me to mount the bilge pumps somewhere else on the vehicle. The only extra step was to connect the thrusters to the blocks with some tubing. Problem was, I couldn't quite make that work - the tubing would kink or the blocks weren't the right shape or something else would go wrong and leave the vehicle unable to maneuver. So, as a backup plan, I decided the ROV would not have up-thrusters - it would just be positively buoyant. When I wanted to descend, I would simply run the down-thrusters and then pulse them to maintain my depth. Unfortunately, this didn't really work.
that would give me way more degrees of freedom and allow me to mount the bilge pumps somewhere else on the vehicle. The only extra step was to connect the thrusters to the blocks with some tubing. Problem was, I couldn't quite make that work - the tubing would kink or the blocks weren't the right shape or something else would go wrong and leave the vehicle unable to maneuver. So, as a backup plan, I decided the ROV would not have up-thrusters - it would just be positively buoyant. When I wanted to descend, I would simply run the down-thrusters and then pulse them to maintain my depth. Unfortunately, this didn't really work.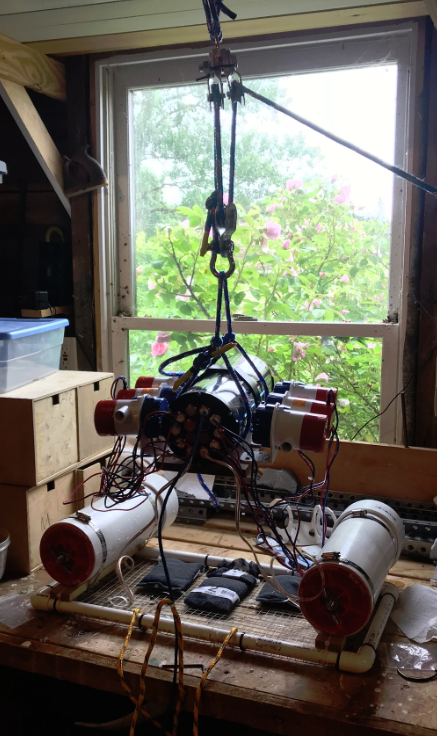
 Derek F
Derek F

 Nick Rehm
Nick Rehm
 Alex Rich
Alex Rich